Structure and Interpretation of Classical Mechanics
.
A spherical pendulum is a massive bob, subject to uniform gravity, that may swing in three dimensions, but remains at a given distance from the pivot.
Formulate a Lagrangian for a spherical pendulum, driven by vertical motion of the pivot.
…
~~~
How come [the equations]?
Maybe just using the above equation but set the  constant. But I have
constant. But I have
to add a something in order to realize the moving center.
— Me@2006
.
[guess]
(define (KE-particle m v)
(* 1/2 m (square v)))
(define ((extract-particle pieces) local i)
(let* ((indices (apply up
(iota pieces
(* i pieces))))
(extract (lambda (tuple)
(vector-map
(lambda (i) (ref tuple i))
indices))))
(up (time local)
(extract (coordinate local))
(extract (velocity local)))))
(define (U-constraint R qs q lambd)
(* lambd
(- (square (- q qs))
(square R))))
(define ((U-gravity g m) q)
(let ((z (ref q 2)))
(* m g z)))
(define ((L-rect m R qs U) local)
(let* ((extract (extract-particle 3))
(p (extract local 0))
(t (time p))
(q (coordinate p))
(v (velocity p))
(lambd (ref (coordinate local) 3)))
(- (KE-particle m v)
(U q)
(U-constraint R (qs t) q lambd))))
(let* ((U (U-gravity 'g 'm))
(xs (lambda (t) 0))
(ys (lambda (t) 0))
(zs (literal-function 'z_s))
(qs (up xs ys zs))
(L (L-rect 'm 'R qs U))
(q-rect (up (literal-function 'x)
(literal-function 'y)
(literal-function 'z)
(literal-function 'lambda))))
(show-expression
((compose L (Gamma q-rect)) 't)))
(+ (* (expt R 2) (lambda t))
(* -1 g m (z t))
(* 1/2 m (expt ((D x) t) 2))
(* 1/2 m (expt ((D y) t) 2))
(* 1/2 m (expt ((D z) t) 2))
(* -1 (lambda t) (expt (z_s t) 2))
(* 2 (lambda t) (z_s t) (z t))
(* -1 (lambda t) (expt (z t) 2))
(* -1 (lambda t) (expt (y t) 2))
(* -1 (lambda t) (expt (x t) 2)))

(define ((sf->rf qs) state-with-force)
(let* ((extract (extract-particle 3))
(p (extract state-with-force 0))
(t (time p))
(q (coordinate p))
(lambd (ref (coordinate
state-with-force) 3))
(r (ref q 0))
(theta (ref q 1))
(phi (ref q 2))
(xs (ref qs 0))
(ys (ref qs 1))
(zs (ref qs 2))
(x (+ (xs t)
(* r (sin theta) (cos phi))))
(y (+ (ys t)
(* r (sin theta) (sin phi))))
(z (+ (zs t)
(* r (cos theta)))))
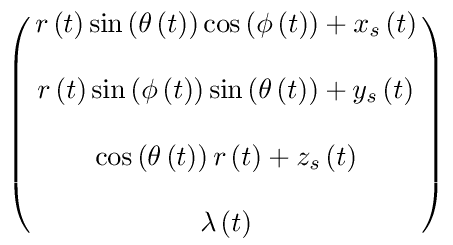
(up x y z lambd)))
(let* ((xs (literal-function 'x_s))
(ys (literal-function 'y_s))
(zs (literal-function 'z_s))
(qs (up xs ys zs))
(q (up (literal-function 'r)
(literal-function 'theta)
(literal-function 'phi)
(literal-function 'lambda))))
(show-expression
((compose (sf->rf qs) (Gamma q))
't)))
(define ((F->C F) local)
(->local (time local)
(F local)
(+ (((partial 0) F) local)
(* (((partial 1) F) local)
(velocity local)))))
(define (L-driven m R qs U)
(compose
(L-rect m R qs U)
(F->C (sf->rf qs))))
…
[guess]
— Me@2023-08-20 05:02:09 PM
.
.
2023.08.23 Wednesday (c) All rights reserved by ACHK




 be a vector function in
be a vector function in  .
. by applying the divergence theorem to a spherical shell of a radius
by applying the divergence theorem to a spherical shell of a radius  and width
and width  .
. -ball:
-ball:

 be a spherical shell of radius
be a spherical shell of radius 




You must be logged in to post a comment.