The Jacobian of the inverse of a transformation is the inverse of the Jacobian of that transformation
.
In this post, we would like to illustrate the meaning of
the Jacobian of the inverse of a transformation = the inverse of the Jacobian of that transformation
by proving a special case.
.
Consider a transformation  , which is an one-to-one mapping from unbarred
, which is an one-to-one mapping from unbarred  ‘s to barred
‘s to barred  coordinates, where
coordinates, where  .
.
By definition, the Jacobian matrix J of  is
is

.
Now we consider the the inverse of the transformation :

By definition, the Jacobian matrix  of this inverse transformation,
of this inverse transformation,  , is
, is

.
On the other hand, the inverse of Jacobian  of the original transformation is
of the original transformation is

.
If  , their (1, 1)-elementd should be equation:
, their (1, 1)-elementd should be equation:

Let’s try to prove that.
.
Consider equations


Differentiate both sides of each equation with respect to  , we have:
, we have:


.


.

 ,
,
results

…
— Me@2018-08-09 09:49:51 PM
.
.
2018.08.09 Thursday (c) All rights reserved by ACHK








along the direction of the vector
is
is called directional derivative.


 is independent of
is independent of  .
.
 is invariant under change of coordinates …
is invariant under change of coordinates …
 at
at  with respect to
with respect to  .
. .
. is an operator, meaning “the slope of the tangent of”. So the expression
is an operator, meaning “the slope of the tangent of”. So the expression  , meaning
, meaning  , is not a fraction.
, is not a fraction. in the graph.
in the graph.
 has no relation with the symbol
has no relation with the symbol 
 also has no relation with the symbol
also has no relation with the symbol  , where
, where  , and the point
, and the point  on the tangent line
on the tangent line  , where
, where  is the slope of the tangent line. In other words,
is the slope of the tangent line. In other words,
![\displaystyle{dy = \left[ \left( \frac{d}{dx} \right) y \right] dx}](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle%7Bdy+%3D+%5Cleft%5B+%5Cleft%28+%5Cfrac%7Bd%7D%7Bdx%7D+%5Cright%29+y+%5Cright%5D+dx%7D&bg=ffffff&fg=333333&s=0&c=20201002)
 and
and 






 represents the spatial rate of change of a scalar field along the
represents the spatial rate of change of a scalar field along the  direction.
direction. represents a displacement from point 1 to point 2 along the
represents a displacement from point 1 to point 2 along the  represents a displacement from point 2 to point 3 along the
represents a displacement from point 2 to point 3 along the  direction.
direction. due to the displacement
due to the displacement  is
is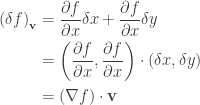
 represents the position of an object and
represents the position of an object and  is a scalar field on the
is a scalar field on the  represents the spatial rate of change of
represents the spatial rate of change of  when the object has finished moving
when the object has finished moving 

 as
as

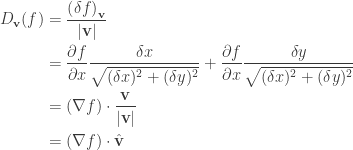
 is called directional derivative.
is called directional derivative. is in the steepest direction.
is in the steepest direction. is chosen to be parallel to
is chosen to be parallel to  would be maximized.
would be maximized.
You must be logged in to post a comment.