

(defun 3b1b () (interactive) (setq is-python-mode (string= major-mode "python-mode")) (if (not is-python-mode) (print "This is not a python file.") (print buffer-file-name) (setq the-command (format "%s %s %s" "manim -p" buffer-file-name "JustAShape")) (print the-command) (shell-command the-command) ) ) (global-set-key (kbd "C-p") '3b1b) (global-set-key (kbd "C-/") 'comment-region) (global-set-key (kbd "C-.") 'uncomment-region)
— Me@2022-06-05 04:00:37 PM
.
.
2022.06.05 Sunday (c) All rights reserved by ACHK
 be a function of
be a function of  and
and  only, with total time derivative
only, with total time derivative
 are identically zero, …
are identically zero, …![\displaystyle{ \begin{aligned} D ( \partial_2 L \circ \Gamma[q]) - (\partial_1 L \circ \Gamma[q]) &= 0 \\ \end{aligned}}](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle%7B+%5Cbegin%7Baligned%7D+D+%28+%5Cpartial_2+L+%5Ccirc+%5CGamma%5Bq%5D%29+-+%28%5Cpartial_1+L+%5Ccirc+%5CGamma%5Bq%5D%29+%26%3D+0+%5C%5C+%5Cend%7Baligned%7D%7D&bg=ffffff&fg=333333&s=0&c=20201002)


![\displaystyle{ \begin{aligned} D_t F \circ \Gamma[q] (t) &= \partial_0 F(t, q, v, a, ...) + \partial_1 F(t, q, v, a, ...) v(t) + \partial_2 F(t, q, v, a, ...) a(t) + ... \\ \end{aligned} }](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle%7B++%5Cbegin%7Baligned%7D++D_t+F+%5Ccirc+%5CGamma%5Bq%5D+%28t%29++%26%3D+%5Cpartial_0+F%28t%2C+q%2C+v%2C+a%2C+...%29+%2B+%5Cpartial_1+F%28t%2C+q%2C+v%2C+a%2C+...%29+v%28t%29+%2B+%5Cpartial_2+F%28t%2C+q%2C+v%2C+a%2C+...%29+a%28t%29+%2B+...+++%5C%5C+++%5Cend%7Baligned%7D++%7D&bg=ffffff&fg=333333&s=0&c=20201002)
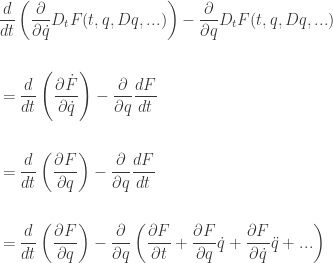
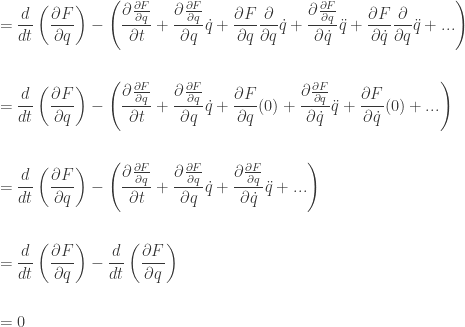
 into the Lagrange equation:
into the Lagrange equation:![\displaystyle{ \begin{aligned} &\frac{d}{dt} \left( \frac{\partial}{\partial \dot q} D_t F (t, q, Dq, ...) \right) - \frac{\partial}{\partial q} D_t F (t, q, Dq, ...) \\ \\ &= \frac{d}{dt} \left[ \frac{\partial}{\partial \dot q} \left( \partial_0 F(t, q, v, a, ...) + \partial_1 F(t, q, v, a, ...) v + \partial_2 F(t, q, v, a, ...) a + ... \right) \right] \\ &- \frac{\partial}{\partial q} \left( \partial_0 F(t, q, v, a, ...) + \partial_1 F(t, q, v, a, ...) v + \partial_2 F(t, q, v, a, ...) a + ... \right) \\ \\ &=\frac{d}{dt} \left[ \partial_2 \partial_0 F + \partial_2 (v \partial_1 F) + \partial_2 (a \partial_2 F) + ... \right] \\ &- \left[ \partial_1 \partial_0 F + \partial_1 (v \partial_1 F) + \partial_1 (a \partial_2 F) + ... \right] \\ \\ &= \partial_0 \left[ \partial_1 \partial_0 F + \partial_1 (v \partial_1 F) + \partial_1 (a \partial_2 F) + ... \right] \\ &+ \partial_1 \left[ \partial_1 \partial_0 F + \partial_1 (v \partial_1 F) + \partial_1 (a \partial_2 F) + ... \right] v \\ &+ \partial_2 \left[ \partial_1 \partial_0 F + \partial_1 (v \partial_1 F) + \partial_1 (a \partial_2 F) + ... \right] a + ... \\ &- \left[ \partial_1 \partial_0 F + \partial_1 (v \partial_1 F) + \partial_1 (a \partial_2 F) + ... \right] \\ \\ &= ... \\ \end{aligned} }](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle%7B+++++%5Cbegin%7Baligned%7D+++++%26%5Cfrac%7Bd%7D%7Bdt%7D+%5Cleft%28+%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+%5Cdot+q%7D+++++D_t+F+%28t%2C+q%2C+Dq%2C+...%29++%5Cright%29+-+%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+q%7D+++++D_t+F+%28t%2C+q%2C+Dq%2C+...%29+%5C%5C+%5C%5C++++%26%3D+%5Cfrac%7Bd%7D%7Bdt%7D+%5Cleft%5B+%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+%5Cdot+q%7D+++++%5Cleft%28+%5Cpartial_0+F%28t%2C+q%2C+v%2C+a%2C+...%29+%2B+%5Cpartial_1+F%28t%2C+q%2C+v%2C+a%2C+...%29+v+%2B+%5Cpartial_2+F%28t%2C+q%2C+v%2C+a%2C+...%29+a+%2B+...+%5Cright%29+%5Cright%5D+%5C%5C++++%26-+%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+q%7D+++++%5Cleft%28+%5Cpartial_0+F%28t%2C+q%2C+v%2C+a%2C+...%29+%2B+%5Cpartial_1+F%28t%2C+q%2C+v%2C+a%2C+...%29+v+%2B+%5Cpartial_2+F%28t%2C+q%2C+v%2C+a%2C+...%29+a+%2B+...+%5Cright%29+++%5C%5C+++++%5C%5C++++%26%3D%5Cfrac%7Bd%7D%7Bdt%7D+%5Cleft%5B++++++++%5Cpartial_2+%5Cpartial_0+F++%2B+%5Cpartial_2+%28v+%5Cpartial_1+F%29+++%2B+%5Cpartial_2+%28a+%5Cpartial_2+F%29+%2B+...++%5Cright%5D+%5C%5C++++%26-+%5Cleft%5B++++%5Cpartial_1+%5Cpartial_0+F++%2B+%5Cpartial_1+%28v+%5Cpartial_1+F%29+++%2B+%5Cpartial_1+%28a+%5Cpartial_2+F%29+%2B+...+%5Cright%5D+++%5C%5C++++%5C%5C++++%26%3D+%5Cpartial_0+%5Cleft%5B++++++++++%5Cpartial_1+%5Cpartial_0+F++%2B+%5Cpartial_1+%28v+%5Cpartial_1+F%29+++%2B+%5Cpartial_1+%28a+%5Cpartial_2+F%29+%2B+...++%5Cright%5D+%5C%5C+++++%26%2B+%5Cpartial_1+%5Cleft%5B++++++++++%5Cpartial_1+%5Cpartial_0+F++%2B+%5Cpartial_1+%28v+%5Cpartial_1+F%29+++%2B+%5Cpartial_1+%28a+%5Cpartial_2+F%29+%2B+...+++%5Cright%5D+v+%5C%5C++++%26%2B+%5Cpartial_2+%5Cleft%5B++++++++++%5Cpartial_1+%5Cpartial_0+F++%2B+%5Cpartial_1+%28v+%5Cpartial_1+F%29+++%2B+%5Cpartial_1+%28a+%5Cpartial_2+F%29+%2B+...+++%5Cright%5D+a+%2B+...+%5C%5C++++%26-+%5Cleft%5B++++++%5Cpartial_1+%5Cpartial_0+F++%2B+%5Cpartial_1+%28v+%5Cpartial_1+F%29+++%2B+%5Cpartial_1+%28a+%5Cpartial_2+F%29+%2B+...++%5Cright%5D+++%5C%5C++++++++%5C%5C++++%26%3D+...+%5C%5C+++++%5Cend%7Baligned%7D++++%7D&bg=ffffff&fg=333333&s=0&c=20201002)
 :
:
![\displaystyle{\begin{aligned} &\frac{\partial \dot F}{\partial \dot q} \\ \\ &= \frac{\partial }{\partial \dot q} \left( \frac{\partial F}{\partial t} + \frac{\partial F}{\partial q} \dot q + \frac{\partial F}{\partial \dot q} \ddot q + ... \right) \\ \\ &= \frac{\partial }{\partial \dot q} \frac{\partial F}{\partial t} + \left( \frac{\partial }{\partial \dot q}\frac{\partial F}{\partial q} \right) \dot q + \frac{\partial F}{\partial q} \frac{\partial }{\partial \dot q}\dot q + \left( \frac{\partial }{\partial \dot q}\frac{\partial F}{\partial \dot q} \right) \ddot q + \frac{\partial F}{\partial \dot q} \frac{\partial }{\partial \dot q}\ddot q + ... \\ \\ &= \frac{\partial }{\partial \dot q} \frac{\partial F}{\partial t} + \left( \frac{\partial }{\partial \dot q}\frac{\partial F}{\partial q} \right) \dot q + \frac{\partial F}{\partial q} (1) + \left( \frac{\partial }{\partial \dot q}\frac{\partial F}{\partial \dot q} \right) \ddot q + \frac{\partial F}{\partial \dot q} (0) + ... \\ \\ &= \frac{\partial }{\partial \dot q} \frac{\partial F}{\partial t} + \left( \frac{\partial }{\partial \dot q}\frac{\partial F}{\partial q} \right)\dot q + \frac{\partial F}{\partial q} + \left( \frac{\partial }{\partial \dot q}\frac{\partial F}{\partial \dot q}\right) \ddot q + ... \\ \\ &= \left[ \frac{\partial \frac{\partial }{\partial \dot q} F}{\partial t} + \left( \frac{\partial \frac{\partial }{\partial \dot q} F}{\partial q} \right)\dot q + \left( \frac{\partial \frac{\partial }{\partial \dot q} F}{\partial \dot q}\right) \ddot q + ... \right] + \frac{\partial F}{\partial q} \\ \\ &= \frac{d}{dt} \frac{\partial F }{\partial \dot q} + \frac{\partial F}{\partial q} \\ \\ \end{aligned}}](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle%7B%5Cbegin%7Baligned%7D++++++++++++%26%5Cfrac%7B%5Cpartial+%5Cdot+F%7D%7B%5Cpartial+%5Cdot+q%7D+%5C%5C+%5C%5C++++++%26%3D+++++%5Cfrac%7B%5Cpartial+%7D%7B%5Cpartial+%5Cdot+q%7D+%5Cleft%28+%5Cfrac%7B%5Cpartial+F%7D%7B%5Cpartial+t%7D+++++%2B+%5Cfrac%7B%5Cpartial+F%7D%7B%5Cpartial+q%7D+%5Cdot+q+%2B+%5Cfrac%7B%5Cpartial+F%7D%7B%5Cpartial+%5Cdot+q%7D+%5Cddot+q+%2B+...+%5Cright%29+++%5C%5C+%5C%5C++++%26%3D+%5Cfrac%7B%5Cpartial+%7D%7B%5Cpartial+%5Cdot+q%7D+%5Cfrac%7B%5Cpartial+F%7D%7B%5Cpartial+t%7D+++++%2B+%5Cleft%28+%5Cfrac%7B%5Cpartial+%7D%7B%5Cpartial+%5Cdot+q%7D%5Cfrac%7B%5Cpartial+F%7D%7B%5Cpartial+q%7D+%5Cright%29+%5Cdot+q+++%2B+%5Cfrac%7B%5Cpartial+F%7D%7B%5Cpartial+q%7D+%5Cfrac%7B%5Cpartial+%7D%7B%5Cpartial+%5Cdot+q%7D%5Cdot+q++++++%2B+%5Cleft%28+%5Cfrac%7B%5Cpartial+%7D%7B%5Cpartial+%5Cdot+q%7D%5Cfrac%7B%5Cpartial+F%7D%7B%5Cpartial+%5Cdot+q%7D+%5Cright%29+%5Cddot+q++++%2B+%5Cfrac%7B%5Cpartial+F%7D%7B%5Cpartial+%5Cdot+q%7D+%5Cfrac%7B%5Cpartial+%7D%7B%5Cpartial+%5Cdot+q%7D%5Cddot+q+++++%2B+...+%5C%5C+%5C%5C++++++++%26%3D+%5Cfrac%7B%5Cpartial+%7D%7B%5Cpartial+%5Cdot+q%7D+%5Cfrac%7B%5Cpartial+F%7D%7B%5Cpartial+t%7D+++++%2B+%5Cleft%28+%5Cfrac%7B%5Cpartial+%7D%7B%5Cpartial+%5Cdot+q%7D%5Cfrac%7B%5Cpartial+F%7D%7B%5Cpartial+q%7D+%5Cright%29+%5Cdot+q+++%2B+%5Cfrac%7B%5Cpartial+F%7D%7B%5Cpartial+q%7D+%281%29++++++%2B+%5Cleft%28+%5Cfrac%7B%5Cpartial+%7D%7B%5Cpartial+%5Cdot+q%7D%5Cfrac%7B%5Cpartial+F%7D%7B%5Cpartial+%5Cdot+q%7D+%5Cright%29+%5Cddot+q++++%2B+%5Cfrac%7B%5Cpartial+F%7D%7B%5Cpartial+%5Cdot+q%7D+%280%29+++++%2B+...+%5C%5C+%5C%5C++++++%26%3D+%5Cfrac%7B%5Cpartial+%7D%7B%5Cpartial+%5Cdot+q%7D+%5Cfrac%7B%5Cpartial+F%7D%7B%5Cpartial+t%7D+++++%2B+%5Cleft%28+%5Cfrac%7B%5Cpartial+%7D%7B%5Cpartial+%5Cdot+q%7D%5Cfrac%7B%5Cpartial+F%7D%7B%5Cpartial+q%7D+%5Cright%29%5Cdot+q+++%2B+%5Cfrac%7B%5Cpartial+F%7D%7B%5Cpartial+q%7D+++++++%2B+%5Cleft%28+%5Cfrac%7B%5Cpartial+%7D%7B%5Cpartial+%5Cdot+q%7D%5Cfrac%7B%5Cpartial+F%7D%7B%5Cpartial+%5Cdot+q%7D%5Cright%29+%5Cddot+q+++++++++%2B+...+%5C%5C+%5C%5C++++++++++++%26%3D+++++++%5Cleft%5B+%5Cfrac%7B%5Cpartial+%5Cfrac%7B%5Cpartial+%7D%7B%5Cpartial+%5Cdot+q%7D+F%7D%7B%5Cpartial+t%7D+++++%2B+%5Cleft%28+%5Cfrac%7B%5Cpartial+%5Cfrac%7B%5Cpartial+%7D%7B%5Cpartial+%5Cdot+q%7D+F%7D%7B%5Cpartial+q%7D+%5Cright%29%5Cdot+q+++++++++%2B+%5Cleft%28+%5Cfrac%7B%5Cpartial+%5Cfrac%7B%5Cpartial+%7D%7B%5Cpartial+%5Cdot+q%7D+F%7D%7B%5Cpartial+%5Cdot+q%7D%5Cright%29+%5Cddot+q++++++%2B+...+%5Cright%5D++++++%2B+%5Cfrac%7B%5Cpartial+F%7D%7B%5Cpartial+q%7D+++++%5C%5C+%5C%5C++++++++++%26%3D+%5Cfrac%7Bd%7D%7Bdt%7D+%5Cfrac%7B%5Cpartial+F+%7D%7B%5Cpartial+%5Cdot+q%7D+++++%2B+%5Cfrac%7B%5Cpartial+F%7D%7B%5Cpartial+q%7D++++++%5C%5C+%5C%5C++++%5Cend%7Baligned%7D%7D&bg=ffffff&fg=333333&s=0&c=20201002)
 depends on
depends on  only, then
only, then  will depend on
will depend on  only.
only.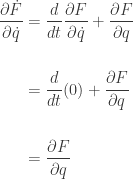

You must be logged in to post a comment.