
A Clojure(script) implementation of the
scmutilssystem for math and physics investigations in the Clojure and Clojurescript languages.
.
1. To install Clojure in Ubuntu, just this command is enough:
sudo apt-get install elpa-cider
Although the Clojure version you get is probably not the most updated one, that is not important, because you can specify which version you want in the config file of each project.
.
2. Then use this command to generate a new project named my-stuff:
lein new app my-stuff
.
3. Use Emacs to open the file:
~/my-stuff/project.clj
.
4. Replace the existing :dependencies line with this one
:dependencies [[org.clojure/clojure "1.11.1"]
[sicmutils "0.22.0"]]
And make sure that both clojure and sicmutils have the most updated version numbers.
.
5. In Emacs, type the command
M-x cider-jack-in
.
6. In the clojure window (cider-repl), type
(clojure-version)
with enter at the end.
.
7. Type
(require '[sicmutils.env :as env])
.
8. Type
(env/bootstrap-repl!)
.
9. Code
((D cube) 'x)
will result
(+ (* x x) (* x (+ x x)))
.
10. Type the Emacs command
M-p
to access the last input. Then modify it into
(simplify ((D cube) 'x))
.
It will result
(* 3 (expt x 2))
.
11. Code
(->TeX (simplify ((D cube) 'x)))
will give the 
3\\,{x}^{2}
.
12. You can exit by the Emacs command
<C-c C-q>
.
For the time being, SICMUtils is not suitable for the book SICM (Structure and Interpretation of Classical Mechanics). In other words, SICMUtils cannot replace the scmutils library yet, because:
a. You would have to do the translation manually, from the scmutils code in the book to SICMUtils.
b. Although it can generate
c. It cannot plot graphs.
However, SICMUtils has one advantage over scmutils. It can generate scmutils cannot. So I am planning to use both scmutils and SICMUtils.
Also, I will learn how to use SICMUtils with other Clojure libraries and the Jupyter Notebook. That would get
— Me@2022-07-26 11:03:51 AM
.
.
2022.07.26 Tuesday (c) All rights reserved by ACHK

 varies with time (if it doesn’t,
varies with time (if it doesn’t,  is superfluous), the Lagrangian, or the essential physical situation, doesn’t vary. Hence the initial value of
is superfluous), the Lagrangian, or the essential physical situation, doesn’t vary. Hence the initial value of  and
and  then
then

 curries
curries  ‘s first parameter.
‘s first parameter.![\displaystyle{ \begin{aligned} \partial_1 L \circ \Gamma[q] &= D ( \partial_2 L \circ \Gamma[q]) \\ \\ &= \partial_0 ( \partial_2 L \circ \Gamma[q]) Dt + \partial_1 ( \partial_2 L \circ \Gamma[q]) Dq + \partial_2 ( \partial_2 L \circ \Gamma[q]) Dv \\ \\ &= \partial_0 \partial_2 L \circ \Gamma[q] + ( \partial_1 \partial_2 L \circ \Gamma[q]) Dq + (\partial_2 \partial_2 L \circ \Gamma[q]) D^2 q \\ \\ \end{aligned}}](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle%7B+%5Cbegin%7Baligned%7D+++++%5Cpartial_1+L+%5Ccirc+%5CGamma%5Bq%5D+++++%26%3D+D+%28+%5Cpartial_2+L+%5Ccirc+%5CGamma%5Bq%5D%29+%5C%5C+%5C%5C++++%26%3D+%5Cpartial_0+%28+%5Cpartial_2+L+%5Ccirc+%5CGamma%5Bq%5D%29+Dt+%2B++%5Cpartial_1+%28+%5Cpartial_2+L+%5Ccirc+%5CGamma%5Bq%5D%29+Dq+%2B+%5Cpartial_2+%28+%5Cpartial_2+L+%5Ccirc+%5CGamma%5Bq%5D%29+Dv+%5C%5C+%5C%5C+++++%26%3D+%5Cpartial_0+%5Cpartial_2+L+%5Ccirc+%5CGamma%5Bq%5D+%2B++%28+%5Cpartial_1+%5Cpartial_2+L+%5Ccirc+%5CGamma%5Bq%5D%29+Dq+%2B+%28%5Cpartial_2+%5Cpartial_2+L+%5Ccirc+%5CGamma%5Bq%5D%29+D%5E2+q+%5C%5C+%5C%5C+++++%5Cend%7Baligned%7D%7D&bg=ffffff&fg=333333&s=0&c=20201002)
![\displaystyle{ \begin{aligned} (\partial_2 \partial_2 L \circ \Gamma[q]) D^2 q &= \partial_1 L \circ \Gamma[q] - \partial_0 \partial_2 L \circ \Gamma[q] - (\partial_1 \partial_2 L \circ \Gamma[q]) Dq \\ \\ D^2 q &= \left[ \partial_2 \partial_2 L \circ \Gamma[q] \right]^{-1} \left\{ \partial_1 L \circ \Gamma[q] - \partial_0 \partial_2 L \circ \Gamma[q] - (\partial_1 \partial_2 L \circ \Gamma[q]) Dq \right\} \\ \\ \end{aligned}}](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle%7B+%5Cbegin%7Baligned%7D++++++%28%5Cpartial_2+%5Cpartial_2+L+%5Ccirc+%5CGamma%5Bq%5D%29+D%5E2+q+++++%26%3D+++++%5Cpartial_1+L+%5Ccirc+%5CGamma%5Bq%5D+++++-+%5Cpartial_0+%5Cpartial_2+L+%5Ccirc+%5CGamma%5Bq%5D+++++-+%28%5Cpartial_1+%5Cpartial_2+L+%5Ccirc+%5CGamma%5Bq%5D%29+Dq++%5C%5C+%5C%5C+++++++++D%5E2+q+++++%26%3D+++++%5Cleft%5B+%5Cpartial_2+%5Cpartial_2+L+%5Ccirc+%5CGamma%5Bq%5D+%5Cright%5D%5E%7B-1%7D++++%5Cleft%5C%7B+%5Cpartial_1+L+%5Ccirc+%5CGamma%5Bq%5D+++++-+%5Cpartial_0+%5Cpartial_2+L+%5Ccirc+%5CGamma%5Bq%5D+++++-+%28%5Cpartial_1+%5Cpartial_2+L+%5Ccirc+%5CGamma%5Bq%5D%29+Dq++%5Cright%5C%7D+%5C%5C+%5C%5C++++++%5Cend%7Baligned%7D%7D&bg=ffffff&fg=333333&s=0&c=20201002)
![\displaystyle{\left[ \partial_2 \partial_2 L \circ \Gamma \right]}](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle%7B%5Cleft%5B+%5Cpartial_2+%5Cpartial_2+L+%5Ccirc+%5CGamma+%5Cright%5D%7D&bg=ffffff&fg=333333&s=0&c=20201002) is a structure that can be represented by a symmetric square matrix, so we can compute its inverse.
is a structure that can be represented by a symmetric square matrix, so we can compute its inverse.
![\displaystyle{ \begin{aligned} D \left( \frac{\partial}{\partial \dot q_1} L \circ \Gamma[\begin{bmatrix} q_1 \\ q_2 \\ \vdots \end{bmatrix}] \right) - \left(\frac{\partial}{\partial q_1} L \circ \Gamma[\begin{bmatrix} q_1 \\ q_2 \\ \vdots \end{bmatrix}]\right) &= 0 \\ D \left( \frac{\partial}{\partial \dot q_2} L \circ \Gamma[\begin{bmatrix} q_1 \\ q_2 \\ \vdots \end{bmatrix}] \right) - \left(\frac{\partial}{\partial q_2} L \circ \Gamma[\begin{bmatrix} q_1 \\ q_2 \\ \vdots \end{bmatrix}]\right) &= 0 \\ &\vdots \\ \end{aligned}}](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle%7B+++%5Cbegin%7Baligned%7D+D+%5Cleft%28+%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+%5Cdot+q_1%7D+L+%5Ccirc+%5CGamma%5B%5Cbegin%7Bbmatrix%7D+q_1+%5C%5C+q_2+%5C%5C+%5Cvdots+%5Cend%7Bbmatrix%7D%5D+%5Cright%29+-+%5Cleft%28%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+q_1%7D+L+%5Ccirc+%5CGamma%5B%5Cbegin%7Bbmatrix%7D+q_1+%5C%5C+q_2+%5C%5C+%5Cvdots+%5Cend%7Bbmatrix%7D%5D%5Cright%29+++%26%3D+0+%5C%5C+++++D+%5Cleft%28+%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+%5Cdot+q_2%7D+L+%5Ccirc+%5CGamma%5B%5Cbegin%7Bbmatrix%7D+q_1+%5C%5C+q_2+%5C%5C+%5Cvdots+%5Cend%7Bbmatrix%7D%5D+%5Cright%29+-+%5Cleft%28%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+q_2%7D+L+%5Ccirc+%5CGamma%5B%5Cbegin%7Bbmatrix%7D+q_1+%5C%5C+q_2+%5C%5C+%5Cvdots+%5Cend%7Bbmatrix%7D%5D%5Cright%29+%26%3D+0+%5C%5C+++++%26%5Cvdots+%5C%5C+++%5Cend%7Baligned%7D%7D&bg=ffffff&fg=333333&s=0&c=20201002)
![\displaystyle{ \begin{aligned} D \left( \frac{\partial}{\partial \dot q_1} L \circ \Gamma[\vec q] \right) - \left(\frac{\partial}{\partial q_1} L \circ \Gamma[\vec q]\right) &= 0 \\ D \left( \frac{\partial}{\partial \dot q_2} L \circ \Gamma[\vec q] \right) - \left(\frac{\partial}{\partial q_2} L \circ \Gamma[\vec q]\right) &= 0 \\ &\vdots \\ \end{aligned}}](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle%7B+++%5Cbegin%7Baligned%7D+D+%5Cleft%28+%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+%5Cdot+q_1%7D+L+%5Ccirc+%5CGamma%5B%5Cvec+q%5D+%5Cright%29+++-+%5Cleft%28%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+q_1%7D+L+%5Ccirc+%5CGamma%5B%5Cvec+q%5D%5Cright%29+++%26%3D+0+%5C%5C+++++D+%5Cleft%28+%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+%5Cdot+q_2%7D+L+%5Ccirc+%5CGamma%5B%5Cvec+q%5D+%5Cright%29+-+%5Cleft%28%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+q_2%7D+L+%5Ccirc+%5CGamma%5B%5Cvec+q%5D%5Cright%29+%26%3D+0+%5C%5C+++++%26%5Cvdots+%5C%5C+++%5Cend%7Baligned%7D%7D&bg=ffffff&fg=333333&s=0&c=20201002)
![\displaystyle{ \begin{aligned} D \left( \vec \partial_2 L \circ \Gamma[\vec q] \right) - \left(\vec \partial_1 L \circ \Gamma[\vec q]\right) &= 0 \\ \end{aligned}}](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle%7B+++%5Cbegin%7Baligned%7D+D+%5Cleft%28+%5Cvec+%5Cpartial_2+L+%5Ccirc+%5CGamma%5B%5Cvec+q%5D+%5Cright%29+++-+%5Cleft%28%5Cvec+%5Cpartial_1+L+%5Ccirc+%5CGamma%5B%5Cvec+q%5D%5Cright%29+++%26%3D+0+%5C%5C+++%5Cend%7Baligned%7D%7D&bg=ffffff&fg=333333&s=0&c=20201002)

![\displaystyle{ \begin{aligned} \vec \partial_1 L \circ \Gamma[\vec q] &= D \left( \vec \partial_2 L \circ \Gamma[\vec q] \right) \\ \\ &= \partial_0 \left( \vec \partial_2 L \circ \Gamma[\vec q] \right) Dt \\ &+ \partial_{q_1} \left( \vec \partial_2 L \circ \Gamma[\vec q] \right) Dq_1 + \partial_{\dot q_1} \left( \vec \partial_2 L \circ \Gamma[\vec q] \right) D \dot q_1 \\ &+ \partial_{q_2} \left( \vec \partial_2 L \circ \Gamma[\vec q] \right) Dq_2 + \partial_{\dot q_2} \left( \vec \partial_2 L \circ \Gamma[\vec q] \right) D \dot q_2 \\ &+ ... \\ \\ &= \partial_0 \left( \vec \partial_2 L \circ \Gamma[\vec q] \right) \\ &+ \begin{bmatrix} \partial_{q_1} & \partial_{q_2} & ... \end{bmatrix} \left( \vec \partial_2 L \circ \Gamma[\vec q] \right) D \begin{bmatrix} q_1 \\ q_2 \\ \vdots \end{bmatrix} \\ &+ \begin{bmatrix} \partial_{\dot q_1} & \partial_{\dot q_2} & ... \end{bmatrix} \left( \vec \partial_2 L \circ \Gamma[\vec q] \right) D^2 \begin{bmatrix} q_1 \\ q_2 \\ \vdots \end{bmatrix} \\ \end{aligned}}](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle%7B+++%5Cbegin%7Baligned%7D+++%5Cvec+%5Cpartial_1+L+%5Ccirc+%5CGamma%5B%5Cvec+q%5D+++%26%3D+D+%5Cleft%28+%5Cvec+%5Cpartial_2+L+%5Ccirc+%5CGamma%5B%5Cvec+q%5D+%5Cright%29+%5C%5C+%5C%5C++++%26%3D+%5Cpartial_0+%5Cleft%28+%5Cvec+%5Cpartial_2+L+%5Ccirc+%5CGamma%5B%5Cvec+q%5D+%5Cright%29+Dt++++%5C%5C++++%26%2B+%5Cpartial_%7Bq_1%7D+%5Cleft%28+%5Cvec+%5Cpartial_2+L+%5Ccirc+%5CGamma%5B%5Cvec+q%5D+%5Cright%29+Dq_1++++%2B+%5Cpartial_%7B%5Cdot+q_1%7D+%5Cleft%28+%5Cvec+%5Cpartial_2+L+%5Ccirc+%5CGamma%5B%5Cvec+q%5D+%5Cright%29+D+%5Cdot+q_1+%5C%5C++++%26%2B+%5Cpartial_%7Bq_2%7D+%5Cleft%28+%5Cvec+%5Cpartial_2+L+%5Ccirc+%5CGamma%5B%5Cvec+q%5D+%5Cright%29+Dq_2++++%2B+%5Cpartial_%7B%5Cdot+q_2%7D+%5Cleft%28+%5Cvec+%5Cpartial_2+L+%5Ccirc+%5CGamma%5B%5Cvec+q%5D+%5Cright%29+D+%5Cdot+q_2+%5C%5C++++%26%2B+...+%5C%5C+%5C%5C++++++%26%3D+%5Cpartial_0+%5Cleft%28+%5Cvec+%5Cpartial_2+L+%5Ccirc+%5CGamma%5B%5Cvec+q%5D+%5Cright%29+++++%5C%5C++++%26%2B+%5Cbegin%7Bbmatrix%7D+%5Cpartial_%7Bq_1%7D+%26+%5Cpartial_%7Bq_2%7D+%26+...+%5Cend%7Bbmatrix%7D++++%5Cleft%28+%5Cvec+%5Cpartial_2+L+%5Ccirc+%5CGamma%5B%5Cvec+q%5D+%5Cright%29+D+%5Cbegin%7Bbmatrix%7D+q_1++%5C%5C+q_2+%5C%5C+%5Cvdots+%5Cend%7Bbmatrix%7D+%5C%5C++++%26%2B+%5Cbegin%7Bbmatrix%7D+%5Cpartial_%7B%5Cdot+q_1%7D+%26+%5Cpartial_%7B%5Cdot+q_2%7D+%26+...+%5Cend%7Bbmatrix%7D++++%5Cleft%28+%5Cvec+%5Cpartial_2+L+%5Ccirc+%5CGamma%5B%5Cvec+q%5D+%5Cright%29+D%5E2+%5Cbegin%7Bbmatrix%7D+q_1++%5C%5C+q_2+%5C%5C+%5Cvdots+%5Cend%7Bbmatrix%7D+%5C%5C++++%5Cend%7Baligned%7D%7D&bg=ffffff&fg=333333&s=0&c=20201002)
![\displaystyle{\begin{aligned} \vec \partial_1 L \circ \Gamma[\vec q] &= \partial_0 \left( \vec \partial_2 L \circ \Gamma[\vec q] \right) Dt + \frac{\partial}{\partial \vec q} \left( \vec \partial_2 L \circ \Gamma[\vec q] \right) D \vec q + \frac{\partial}{\partial \vec {\dot q}} \left( \vec \partial_2 L \circ \Gamma[\vec q] \right) D^2 \vec q \\ \end{aligned}}](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle%7B%5Cbegin%7Baligned%7D++++%5Cvec+%5Cpartial_1+L+%5Ccirc+%5CGamma%5B%5Cvec+q%5D++++++%26%3D+%5Cpartial_0+%5Cleft%28+%5Cvec+%5Cpartial_2+L+%5Ccirc+%5CGamma%5B%5Cvec+q%5D+%5Cright%29+Dt++++%2B+%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+%5Cvec+q%7D+++++%5Cleft%28+%5Cvec+%5Cpartial_2+L+%5Ccirc+%5CGamma%5B%5Cvec+q%5D+%5Cright%29+D+%5Cvec+q+++++%2B+%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+%5Cvec+%7B%5Cdot+q%7D%7D+++++%5Cleft%28+%5Cvec+%5Cpartial_2+L+%5Ccirc+%5CGamma%5B%5Cvec+q%5D+%5Cright%29+D%5E2+++%5Cvec+q+%5C%5C++++%5Cend%7Baligned%7D%7D&bg=ffffff&fg=333333&s=0&c=20201002)
![\displaystyle{ \begin{aligned} D \left( \frac{\partial}{\partial \dot q_1} L \circ \Gamma[\begin{bmatrix} q_1 \\ q_2 \end{bmatrix}] \right) - \left(\frac{\partial}{\partial q_1} L \circ \Gamma[\begin{bmatrix} q_1 \\ q_2 \end{bmatrix}]]\right) &= 0 \\ \end{aligned}}](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle%7B+%5Cbegin%7Baligned%7D+D+%5Cleft%28+%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+%5Cdot+q_1%7D+L+%5Ccirc+%5CGamma%5B%5Cbegin%7Bbmatrix%7D+q_1+%5C%5C+q_2+%5Cend%7Bbmatrix%7D%5D+%5Cright%29+-+%5Cleft%28%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+q_1%7D+L+%5Ccirc+%5CGamma%5B%5Cbegin%7Bbmatrix%7D+q_1+%5C%5C+q_2+%5Cend%7Bbmatrix%7D%5D%5D%5Cright%29+%26%3D+0+%5C%5C+%5Cend%7Baligned%7D%7D&bg=ffffff&fg=333333&s=0&c=20201002)
![\displaystyle{ \begin{aligned} D \left( \frac{\partial}{\partial \dot q_2} L \circ \Gamma[\begin{bmatrix} q_1 \\ q_2 \end{bmatrix}]] \right) - \left(\frac{\partial}{\partial q_2} L \circ \Gamma[\begin{bmatrix} q_1 \\ q_2 \end{bmatrix}]]\right) &= 0 \\ \end{aligned}}](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle%7B+%5Cbegin%7Baligned%7D+D+%5Cleft%28+%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+%5Cdot+q_2%7D+L+%5Ccirc+%5CGamma%5B%5Cbegin%7Bbmatrix%7D+q_1+%5C%5C+q_2+%5Cend%7Bbmatrix%7D%5D%5D+%5Cright%29+-+%5Cleft%28%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+q_2%7D+L+%5Ccirc+%5CGamma%5B%5Cbegin%7Bbmatrix%7D+q_1+%5C%5C+q_2+%5Cend%7Bbmatrix%7D%5D%5D%5Cright%29+%26%3D+0+%5C%5C+%5Cend%7Baligned%7D%7D&bg=ffffff&fg=333333&s=0&c=20201002)


![\displaystyle{ \begin{aligned} D \left( \begin{bmatrix} \frac{\partial}{\partial \dot q_1} \\ \frac{\partial}{\partial \dot q_2} \end{bmatrix} L \circ \Gamma[q_1, q_2] \right) - \left( \begin{bmatrix} \frac{\partial}{\partial q_1} \\ \frac{\partial}{\partial q_2} \end{bmatrix} L \circ \Gamma[q_1, q_2]\right) &= 0 \\ D \left( \vec \partial_2 L \circ \Gamma[q_1, q_2] \right) - \left( \vec \partial_1 L \circ \Gamma[q_1, q_2]\right) &= 0 \\ \end{aligned}}](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle%7B+++%5Cbegin%7Baligned%7D+D+%5Cleft%28+%5Cbegin%7Bbmatrix%7D+%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+%5Cdot+q_1%7D++%5C%5C+%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+%5Cdot+q_2%7D++%5Cend%7Bbmatrix%7D+++++++L+%5Ccirc+%5CGamma%5Bq_1%2C+q_2%5D+%5Cright%29+++++-+%5Cleft%28+++++%5Cbegin%7Bbmatrix%7D+%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+q_1%7D++%5C%5C+%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial++q_2%7D++%5Cend%7Bbmatrix%7D+++++L+%5Ccirc+%5CGamma%5Bq_1%2C+q_2%5D%5Cright%29+%26%3D+0+%5C%5C+++++++D+%5Cleft%28+++++%5Cvec+%5Cpartial_2++++L+%5Ccirc+%5CGamma%5Bq_1%2C+q_2%5D+%5Cright%29+++++-+%5Cleft%28+++++%5Cvec+%5Cpartial_1+++++L+%5Ccirc+%5CGamma%5Bq_1%2C+q_2%5D%5Cright%29+%26%3D+0+%5C%5C+++++++%5Cend%7Baligned%7D%7D&bg=ffffff&fg=333333&s=0&c=20201002)
![\displaystyle{ \begin{aligned} \vec \partial_1 L \circ \Gamma[q] &= D ( \vec \partial_2 L \circ \Gamma[q]) \\ \\ \begin{bmatrix} \frac{\partial}{\partial q_1} \\ \frac{\partial}{\partial q_2} \end{bmatrix} L \circ \Gamma[q_1, q_2] &= D \left( \begin{bmatrix} \frac{\partial}{\partial \dot q_1} \\ \frac{\partial}{\partial \dot q_2} \end{bmatrix} L \circ \Gamma[q_1, q_2] \right) \\ \\ \frac{\partial}{\partial q_1} L \circ \Gamma[q_1, q_2] &= \partial_0 \left(\frac{\partial}{\partial \dot q_1} L \circ \Gamma[q_1, q_2] \right) Dt \\ &+ \partial_{q_1} \left(\frac{\partial}{\partial \dot q_1} L \circ \Gamma[q_1, q_2] \right) D q_1 + \partial_{v_1} \left(\frac{\partial}{\partial \dot q_1} L \circ \Gamma[q_1, q_2] \right) D v_1 \\ &+ \partial_{q_2} \left(\frac{\partial}{\partial \dot q_1} L \circ \Gamma[q_1, q_2] \right) D q_2 + \partial_{v_2} \left(\frac{\partial}{\partial \dot q_1} L \circ \Gamma[q_1, q_2] \right) D v_2 \\ \frac{\partial}{\partial q_2} L \circ \Gamma[q_1, q_2] &= ... \\ \end{aligned}}](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle%7B+%5Cbegin%7Baligned%7D+++++++++%5Cvec+%5Cpartial_1+L+%5Ccirc+%5CGamma%5Bq%5D+%26%3D+D+%28+%5Cvec+%5Cpartial_2+L+%5Ccirc+%5CGamma%5Bq%5D%29+%5C%5C+%5C%5C+++++++++%5Cbegin%7Bbmatrix%7D+%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+q_1%7D++%5C%5C+%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial++q_2%7D++%5Cend%7Bbmatrix%7D+++++L+%5Ccirc+%5CGamma%5Bq_1%2C+q_2%5D+++++%26%3D+++++D+%5Cleft%28+%5Cbegin%7Bbmatrix%7D+%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+%5Cdot+q_1%7D++%5C%5C+%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+%5Cdot+q_2%7D++%5Cend%7Bbmatrix%7D+++++++L+%5Ccirc+%5CGamma%5Bq_1%2C+q_2%5D+%5Cright%29+++%5C%5C++%5C%5C++++%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+q_1%7D++++++L+%5Ccirc+%5CGamma%5Bq_1%2C+q_2%5D+++++%26%3D+++++%5Cpartial_0+%5Cleft%28%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+%5Cdot+q_1%7D+L+%5Ccirc+%5CGamma%5Bq_1%2C+q_2%5D+%5Cright%29+Dt+%5C%5C++++%26%2B+%5Cpartial_%7Bq_1%7D+%5Cleft%28%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+%5Cdot+q_1%7D+L+%5Ccirc+%5CGamma%5Bq_1%2C+q_2%5D+%5Cright%29+D+q_1+++++%2B+%5Cpartial_%7Bv_1%7D+%5Cleft%28%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+%5Cdot+q_1%7D+L+%5Ccirc+%5CGamma%5Bq_1%2C+q_2%5D+%5Cright%29+D+v_1+%5C%5C++++%26%2B+%5Cpartial_%7Bq_2%7D+%5Cleft%28%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+%5Cdot+q_1%7D+L+%5Ccirc+%5CGamma%5Bq_1%2C+q_2%5D+%5Cright%29+D+q_2+++++%2B+%5Cpartial_%7Bv_2%7D+%5Cleft%28%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+%5Cdot+q_1%7D+L+%5Ccirc+%5CGamma%5Bq_1%2C+q_2%5D+%5Cright%29+D+v_2+++++++%5C%5C+++++++%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial++q_2%7D++++++L+%5Ccirc+%5CGamma%5Bq_1%2C+q_2%5D+++++%26%3D+++++...++++++%5C%5C++++++%5Cend%7Baligned%7D%7D&bg=ffffff&fg=333333&s=0&c=20201002)
![\displaystyle{ \begin{aligned} \frac{\partial}{\partial q_1} L \circ \Gamma[q_1, q_2] &= \partial_0 \left(\frac{\partial}{\partial \dot q_1} L \circ \Gamma[q_1, q_2] \right) Dt \\ &+ \frac{\partial}{\partial q_1} \left(\frac{\partial}{\partial \dot q_1} L \circ \Gamma[q_1, q_2] \right) D q_1 + \frac{\partial}{\partial q_2} \left(\frac{\partial}{\partial \dot q_1} L \circ \Gamma[q_1, q_2] \right) D q_2 \\ &+ \frac{\partial}{\partial \dot q_1} \left(\frac{\partial}{\partial \dot q_1} L \circ \Gamma[q_1, q_2] \right) D^2 q_1 + \frac{\partial}{\partial \dot q_2} \left(\frac{\partial}{\partial \dot q_1} L \circ \Gamma[q_1, q_2] \right) D^2 q_2 \\ \frac{\partial}{\partial q_2} L \circ \Gamma[q_1, q_2] &= \partial_0 \left(\frac{\partial}{\partial \dot q_2} L \circ \Gamma[q_1, q_2] \right) Dt \\ &+ \frac{\partial}{\partial q_1} \left(\frac{\partial}{\partial \dot q_2} L \circ \Gamma[q_1, q_2] \right) D q_1 + \frac{\partial}{\partial q_2} \left(\frac{\partial}{\partial \dot q_2} L \circ \Gamma[q_1, q_2] \right) D q_2 \\ &+ \frac{\partial}{\partial \dot q_1} \left(\frac{\partial}{\partial \dot q_2} L \circ \Gamma[q_1, q_2] \right) D^2 q_1 + \frac{\partial}{\partial \dot q_2} \left(\frac{\partial}{\partial \dot q_2} L \circ \Gamma[q_1, q_2] \right) D^2 q_2 \\ \end{aligned}}](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle%7B+%5Cbegin%7Baligned%7D+++++++++%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+q_1%7D++++++L+%5Ccirc+%5CGamma%5Bq_1%2C+q_2%5D+++++%26%3D+++++%5Cpartial_0+%5Cleft%28%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+%5Cdot+q_1%7D+L+%5Ccirc+%5CGamma%5Bq_1%2C+q_2%5D+%5Cright%29+Dt+%5C%5C++++%26%2B+%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+q_1%7D++%5Cleft%28%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+%5Cdot+q_1%7D+L+%5Ccirc+%5CGamma%5Bq_1%2C+q_2%5D+%5Cright%29+D+q_1+++++++%2B+%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+q_2%7D++%5Cleft%28%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+%5Cdot+q_1%7D+L+%5Ccirc+%5CGamma%5Bq_1%2C+q_2%5D+%5Cright%29+D+q_2+%5C%5C++++%26%2B+%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+%5Cdot+q_1%7D++%5Cleft%28%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+%5Cdot+q_1%7D+L+%5Ccirc+%5CGamma%5Bq_1%2C+q_2%5D+%5Cright%29+D%5E2+q_1+++++%2B+%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+%5Cdot+q_2%7D+%5Cleft%28%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+%5Cdot+q_1%7D+L+%5Ccirc+%5CGamma%5Bq_1%2C+q_2%5D+%5Cright%29+D%5E2+q_2+++++++%5C%5C++++++%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial++q_2%7D++++++L+%5Ccirc+%5CGamma%5Bq_1%2C+q_2%5D+++++%26%3D+++++%5Cpartial_0+%5Cleft%28%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+%5Cdot+q_2%7D+L+%5Ccirc+%5CGamma%5Bq_1%2C+q_2%5D+%5Cright%29+Dt+%5C%5C++++%26%2B+%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+q_1%7D++%5Cleft%28%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+%5Cdot+q_2%7D+L+%5Ccirc+%5CGamma%5Bq_1%2C+q_2%5D+%5Cright%29+D+q_1+++++++%2B+%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+q_2%7D++%5Cleft%28%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+%5Cdot+q_2%7D+L+%5Ccirc+%5CGamma%5Bq_1%2C+q_2%5D+%5Cright%29+D+q_2+%5C%5C++++%26%2B+%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+%5Cdot+q_1%7D++%5Cleft%28%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+%5Cdot+q_2%7D+L+%5Ccirc+%5CGamma%5Bq_1%2C+q_2%5D+%5Cright%29+D%5E2+q_1+++++%2B+%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+%5Cdot+q_2%7D+%5Cleft%28%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+%5Cdot+q_2%7D+L+%5Ccirc+%5CGamma%5Bq_1%2C+q_2%5D+%5Cright%29+D%5E2+q_2+++++++++%5C%5C+++++++++++%5Cend%7Baligned%7D%7D&bg=ffffff&fg=333333&s=0&c=20201002)
![\displaystyle{\begin{aligned} \vec \partial_1 L \circ \Gamma[q_1, q_2] &= \partial_0 \left(\vec \partial_2 L \circ \Gamma[q_1, q_2] \right) Dt \\ &+ \frac{\partial}{\partial q_1} \left( \vec \partial_2 L \circ \Gamma[q_1, q_2] \right) D q_1 + \frac{\partial}{\partial q_2} \left( \vec \partial_2 L \circ \Gamma[q_1, q_2] \right) D q_2 \\ &+ \frac{\partial}{\partial \dot q_1} \left( \vec \partial_2 L \circ \Gamma[q_1, q_2] \right) D^2 q_1 + \frac{\partial}{\partial \dot q_2} \left( \vec \partial_2 L \circ \Gamma[q_1, q_2] \right) D^2 q_2 \\ \\ \end{aligned}}](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle%7B%5Cbegin%7Baligned%7D++++%5Cvec+%5Cpartial_1++++L+%5Ccirc+%5CGamma%5Bq_1%2C+q_2%5D+++++%26%3D+++++%5Cpartial_0+%5Cleft%28%5Cvec+%5Cpartial_2+L+%5Ccirc+%5CGamma%5Bq_1%2C+q_2%5D+%5Cright%29+Dt+%5C%5C++++%26%2B+%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+q_1%7D++%5Cleft%28++++%5Cvec+%5Cpartial_2++++L+%5Ccirc+%5CGamma%5Bq_1%2C+q_2%5D+%5Cright%29+D+q_1+++++++%2B+%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+q_2%7D++%5Cleft%28++++%5Cvec+%5Cpartial_2+++++L+%5Ccirc+%5CGamma%5Bq_1%2C+q_2%5D+%5Cright%29+D+q_2+%5C%5C++++%26%2B+%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+%5Cdot+q_1%7D++%5Cleft%28++++%5Cvec+%5Cpartial_2+++++L+%5Ccirc+%5CGamma%5Bq_1%2C+q_2%5D+%5Cright%29+D%5E2+q_1+++++%2B+%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+%5Cdot+q_2%7D+%5Cleft%28++++%5Cvec+%5Cpartial_2++L+%5Ccirc+%5CGamma%5Bq_1%2C+q_2%5D+%5Cright%29+D%5E2+q_2+++++++%5C%5C+%5C%5C++++%5Cend%7Baligned%7D%7D&bg=ffffff&fg=333333&s=0&c=20201002)
![\displaystyle{\begin{aligned} \begin{bmatrix} \frac{\partial}{\partial q_1} \\ \frac{\partial}{\partial q_2} \end{bmatrix} L \circ \Gamma[q_1, q_2] &= \partial_0 \left( \begin{bmatrix} \frac{\partial}{\partial \dot q_1} \\ \frac{\partial}{\partial \dot q_2} \end{bmatrix} L \circ \Gamma[q_1, q_2] \right) Dt \\ &+ \frac{\partial}{\partial q_1} \left( \begin{bmatrix} \frac{\partial}{\partial \dot q_1} \\ \frac{\partial}{\partial \dot q_2} \end{bmatrix} L \circ \Gamma[q_1, q_2] \right) D q_1 + \frac{\partial}{\partial q_2} \left( \begin{bmatrix} \frac{\partial}{\partial \dot q_1} \\ \frac{\partial}{\partial \dot q_2} \end{bmatrix} L \circ \Gamma[q_1, q_2] \right) D q_2 \\ &+ \frac{\partial}{\partial \dot q_1} \left( \begin{bmatrix} \frac{\partial}{\partial \dot q_1} \\ \frac{\partial}{\partial \dot q_2} \end{bmatrix} L \circ \Gamma[q_1, q_2] \right) D^2 q_1 + \frac{\partial}{\partial \dot q_2} \left( \begin{bmatrix} \frac{\partial}{\partial \dot q_1} \\ \frac{\partial}{\partial \dot q_2} \end{bmatrix} L \circ \Gamma[q_1, q_2] \right) D^2 q_2 \\ \\ \end{aligned}}](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle%7B%5Cbegin%7Baligned%7D++++%5Cbegin%7Bbmatrix%7D+++++%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+q_1%7D+%5C%5C++++%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+q_2%7D++++%5Cend%7Bbmatrix%7D++++L+%5Ccirc+%5CGamma%5Bq_1%2C+q_2%5D+++++%26%3D+++++%5Cpartial_0+%5Cleft%28++%5Cbegin%7Bbmatrix%7D+++++%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+%5Cdot+q_1%7D+%5C%5C++++%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+%5Cdot+q_2%7D++++%5Cend%7Bbmatrix%7D+++L+%5Ccirc+%5CGamma%5Bq_1%2C+q_2%5D+%5Cright%29+Dt+%5C%5C++++%26%2B+%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+q_1%7D++%5Cleft%28++++%5Cbegin%7Bbmatrix%7D+++++%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+%5Cdot+q_1%7D+%5C%5C++++%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+%5Cdot+q_2%7D++++%5Cend%7Bbmatrix%7D++++++L+%5Ccirc+%5CGamma%5Bq_1%2C+q_2%5D+%5Cright%29+D+q_1+++++++%2B+%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+q_2%7D++%5Cleft%28++++%5Cbegin%7Bbmatrix%7D+++++%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+%5Cdot+q_1%7D+%5C%5C++++%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+%5Cdot+q_2%7D++++%5Cend%7Bbmatrix%7D+++++++L+%5Ccirc+%5CGamma%5Bq_1%2C+q_2%5D+%5Cright%29+D+q_2+%5C%5C++++%26%2B+%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+%5Cdot+q_1%7D++%5Cleft%28++++%5Cbegin%7Bbmatrix%7D+++++%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+%5Cdot+q_1%7D+%5C%5C++++%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+%5Cdot+q_2%7D++++%5Cend%7Bbmatrix%7D+++++++L+%5Ccirc+%5CGamma%5Bq_1%2C+q_2%5D+%5Cright%29+D%5E2+q_1+++++%2B+%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+%5Cdot+q_2%7D+%5Cleft%28++++%5Cbegin%7Bbmatrix%7D+++++%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+%5Cdot+q_1%7D+%5C%5C++++%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+%5Cdot+q_2%7D++++%5Cend%7Bbmatrix%7D++++L+%5Ccirc+%5CGamma%5Bq_1%2C+q_2%5D+%5Cright%29+D%5E2+q_2+++++++%5C%5C+%5C%5C++++%5Cend%7Baligned%7D%7D&bg=ffffff&fg=333333&s=0&c=20201002)
![\displaystyle{ \begin{aligned} \frac{\partial}{\partial \dot q_1} \left(\frac{\partial}{\partial \dot q_1} L \circ \Gamma[\vec q] \right) D^2 q_1 + \frac{\partial}{\partial \dot q_2} \left(\frac{\partial}{\partial \dot q_1} L \circ \Gamma[\vec q] \right) D^2 q_2 &= \frac{\partial}{\partial q_1} L \circ \Gamma[\vec q] - \partial_0 \left(\frac{\partial}{\partial \dot q_1} L \circ \Gamma[\vec q] \right) Dt \\ &- \frac{\partial}{\partial q_1} \left(\frac{\partial}{\partial \dot q_1} L \circ \Gamma[\vec q] \right) D q_1 - \frac{\partial}{\partial q_2} \left(\frac{\partial}{\partial \dot q_1} L \circ \Gamma[\vec q] \right) D q_2 \\ \\ \frac{\partial}{\partial \dot q_1} \left(\frac{\partial}{\partial \dot q_2} L \circ \Gamma[\vec q] \right) D^2 q_1 + \frac{\partial}{\partial \dot q_2} \left(\frac{\partial}{\partial \dot q_2} L \circ \Gamma[\vec q] \right) D^2 q_2 &= \frac{\partial}{\partial q_2} L \circ \Gamma[\vec q] - \partial_0 \left(\frac{\partial}{\partial \dot q_2} L \circ \Gamma[\vec q] \right) Dt \\ &- \frac{\partial}{\partial q_1} \left(\frac{\partial}{\partial \dot q_2} L \circ \Gamma[\vec q] \right) D q_1 - \frac{\partial}{\partial q_2} \left(\frac{\partial}{\partial \dot q_2} L \circ \Gamma[\vec q] \right) D q_2 \\ \end{aligned}}](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle%7B+%5Cbegin%7Baligned%7D+++++%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+%5Cdot+q_1%7D+%5Cleft%28%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+%5Cdot+q_1%7D+L+%5Ccirc+%5CGamma%5B%5Cvec+q%5D+%5Cright%29+D%5E2+q_1+%2B+%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+%5Cdot+q_2%7D+%5Cleft%28%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+%5Cdot+q_1%7D+L+%5Ccirc+%5CGamma%5B%5Cvec+q%5D+%5Cright%29+D%5E2+q_2++++%26%3D+%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+q_1%7D+L+%5Ccirc+%5CGamma%5B%5Cvec+q%5D+++++-+%5Cpartial_0+%5Cleft%28%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+%5Cdot+q_1%7D+L+%5Ccirc+%5CGamma%5B%5Cvec+q%5D+%5Cright%29+Dt+%5C%5C+++++%26-+%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+q_1%7D+%5Cleft%28%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+%5Cdot+q_1%7D+L+%5Ccirc+%5CGamma%5B%5Cvec+q%5D+%5Cright%29+D+q_1+-+%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+q_2%7D+%5Cleft%28%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+%5Cdot+q_1%7D+L+%5Ccirc+%5CGamma%5B%5Cvec+q%5D+%5Cright%29+D+q_2+%5C%5C++++++%5C%5C++++++%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+%5Cdot+q_1%7D+%5Cleft%28%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+%5Cdot+q_2%7D+L+%5Ccirc+%5CGamma%5B%5Cvec+q%5D+%5Cright%29+D%5E2+q_1+%2B+%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+%5Cdot+q_2%7D+%5Cleft%28%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+%5Cdot+q_2%7D+L+%5Ccirc+%5CGamma%5B%5Cvec+q%5D+%5Cright%29+D%5E2+q_2++++++%26%3D+%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+q_2%7D+L+%5Ccirc+%5CGamma%5B%5Cvec+q%5D+-+%5Cpartial_0+%5Cleft%28%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+%5Cdot+q_2%7D+L+%5Ccirc+%5CGamma%5B%5Cvec+q%5D+%5Cright%29+Dt+%5C%5C+++++%26-+%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+q_1%7D+%5Cleft%28%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+%5Cdot+q_2%7D+L+%5Ccirc+%5CGamma%5B%5Cvec+q%5D+%5Cright%29+D+q_1+-+%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+q_2%7D+%5Cleft%28%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+%5Cdot+q_2%7D+L+%5Ccirc+%5CGamma%5B%5Cvec+q%5D+%5Cright%29+D+q_2+%5C%5C+++++++%5Cend%7Baligned%7D%7D&bg=ffffff&fg=333333&s=0&c=20201002)
![\displaystyle{ \begin{aligned} &\begin{bmatrix} \frac{\partial}{\partial \dot q_1} \left(\frac{\partial}{\partial \dot q_1} L \circ \Gamma[\vec q] \right) & \frac{\partial}{\partial \dot q_2} \left(\frac{\partial}{\partial \dot q_1} L \circ \Gamma[\vec q] \right) \\ \frac{\partial}{\partial \dot q_1} \left(\frac{\partial}{\partial \dot q_2} L \circ \Gamma[\vec q] \right) & \frac{\partial}{\partial \dot q_2} \left(\frac{\partial}{\partial \dot q_2} L \circ \Gamma[\vec q] \right) \end{bmatrix} \begin{bmatrix} D^2 q_1 \\ D^2 q_2 \end{bmatrix} \\ &= \begin{bmatrix} \frac{\partial}{\partial q_1} L \circ \Gamma[\vec q] - \partial_0 \left(\frac{\partial}{\partial \dot q_1} L \circ \Gamma[\vec q] \right) Dt - \frac{\partial}{\partial q_1} \left(\frac{\partial}{\partial \dot q_1} L \circ \Gamma[\vec q] \right) D q_1 - \frac{\partial}{\partial q_2} \left(\frac{\partial}{\partial \dot q_1} L \circ \Gamma[\vec q] \right) D q_2 \\ \\ \frac{\partial}{\partial q_2} L \circ \Gamma[\vec q] - \partial_0 \left(\frac{\partial}{\partial \dot q_2} L \circ \Gamma[\vec q] \right) Dt - \frac{\partial}{\partial q_1} \left(\frac{\partial}{\partial \dot q_2} L \circ \Gamma[\vec q] \right) D q_1 - \frac{\partial}{\partial q_2} \left(\frac{\partial}{\partial \dot q_2} L \circ \Gamma[\vec q] \right) D q_2 \\ \end{bmatrix} \end{aligned}}](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle%7B+%5Cbegin%7Baligned%7D+++++%26%5Cbegin%7Bbmatrix%7D++%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+%5Cdot+q_1%7D+%5Cleft%28%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+%5Cdot+q_1%7D+L+%5Ccirc+%5CGamma%5B%5Cvec+q%5D+%5Cright%29+%26++++%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+%5Cdot+q_2%7D+%5Cleft%28%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+%5Cdot+q_1%7D+L+%5Ccirc+%5CGamma%5B%5Cvec+q%5D+%5Cright%29+%5C%5C+++++++%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+%5Cdot+q_1%7D+%5Cleft%28%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+%5Cdot+q_2%7D+L+%5Ccirc+%5CGamma%5B%5Cvec+q%5D+%5Cright%29+%26++++%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+%5Cdot+q_2%7D+%5Cleft%28%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+%5Cdot+q_2%7D+L+%5Ccirc+%5CGamma%5B%5Cvec+q%5D+%5Cright%29++++%5Cend%7Bbmatrix%7D+%5Cbegin%7Bbmatrix%7D++D%5E2+q_1+%5C%5C+D%5E2+q_2+%5Cend%7Bbmatrix%7D+%5C%5C++++++%26%3D+%5Cbegin%7Bbmatrix%7D+%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+q_1%7D+L+%5Ccirc+%5CGamma%5B%5Cvec+q%5D+++++-+%5Cpartial_0+%5Cleft%28%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+%5Cdot+q_1%7D+L+%5Ccirc+%5CGamma%5B%5Cvec+q%5D+%5Cright%29+Dt++++++-+%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+q_1%7D+%5Cleft%28%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+%5Cdot+q_1%7D+L+%5Ccirc+%5CGamma%5B%5Cvec+q%5D+%5Cright%29+D+q_1+-+%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+q_2%7D+%5Cleft%28%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+%5Cdot+q_1%7D+L+%5Ccirc+%5CGamma%5B%5Cvec+q%5D+%5Cright%29+D+q_2+%5C%5C++++++%5C%5C++++%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+q_2%7D+L+%5Ccirc+%5CGamma%5B%5Cvec+q%5D+-+%5Cpartial_0+%5Cleft%28%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+%5Cdot+q_2%7D+L+%5Ccirc+%5CGamma%5B%5Cvec+q%5D+%5Cright%29+Dt++++++-+%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+q_1%7D+%5Cleft%28%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+%5Cdot+q_2%7D+L+%5Ccirc+%5CGamma%5B%5Cvec+q%5D+%5Cright%29+D+q_1+-+%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+q_2%7D+%5Cleft%28%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+%5Cdot+q_2%7D+L+%5Ccirc+%5CGamma%5B%5Cvec+q%5D+%5Cright%29+D+q_2+%5C%5C+++%5Cend%7Bbmatrix%7D++++++%5Cend%7Baligned%7D%7D&bg=ffffff&fg=333333&s=0&c=20201002)
![\displaystyle{ \begin{aligned} &\left(\begin{bmatrix} \frac{\partial}{\partial \dot q_1} \left(\frac{\partial}{\partial \dot q_1} \right) & \frac{\partial}{\partial \dot q_2} \left(\frac{\partial}{\partial \dot q_1} \right) \\ \frac{\partial}{\partial \dot q_1} \left(\frac{\partial}{\partial \dot q_2} \right) & \frac{\partial}{\partial \dot q_2} \left(\frac{\partial}{\partial \dot q_2} \right) \end{bmatrix} L \circ \Gamma[\vec q] \right)\begin{bmatrix} D^2 q_1 \\ D^2 q_2 \end{bmatrix} \\ &= \begin{bmatrix} \frac{\partial}{\partial q_1} \\ \frac{\partial}{\partial q_2} \end{bmatrix} L \circ \Gamma[\vec q] - \left( \partial_0 \begin{bmatrix} \frac{\partial}{\partial \dot q_1} \\ \frac{\partial}{\partial \dot q_2} \end{bmatrix} L \circ \Gamma[\vec q] \right) Dt - \left( \begin{bmatrix} \frac{\partial}{\partial q_1} \left(\frac{\partial}{\partial \dot q_1} \right) & \frac{\partial}{\partial q_2} \left(\frac{\partial}{\partial \dot q_1} \right) \\ \\ \frac{\partial}{\partial q_1} \left(\frac{\partial}{\partial \dot q_2} \right) & \frac{\partial}{\partial q_2} \left(\frac{\partial}{\partial \dot q_2} \right) \\ \end{bmatrix} L \circ \Gamma[\vec q] \right) \begin{bmatrix} D q_1 \\ D q_2 \end{bmatrix} \\ \end{aligned}}](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle%7B+%5Cbegin%7Baligned%7D+++++%26%5Cleft%28%5Cbegin%7Bbmatrix%7D++%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+%5Cdot+q_1%7D+%5Cleft%28%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+%5Cdot+q_1%7D+%5Cright%29+%26++++%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+%5Cdot+q_2%7D+%5Cleft%28%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+%5Cdot+q_1%7D+%5Cright%29+%5C%5C+++++++%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+%5Cdot+q_1%7D+%5Cleft%28%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+%5Cdot+q_2%7D+%5Cright%29+%26++++%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+%5Cdot+q_2%7D+%5Cleft%28%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+%5Cdot+q_2%7D+%5Cright%29++++%5Cend%7Bbmatrix%7D+L+%5Ccirc+%5CGamma%5B%5Cvec+q%5D+%5Cright%29%5Cbegin%7Bbmatrix%7D++D%5E2+q_1+%5C%5C+D%5E2+q_2+%5Cend%7Bbmatrix%7D+%5C%5C++++++%26%3D+++++%5Cbegin%7Bbmatrix%7D+%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+q_1%7D+++++++%5C%5C++++%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+q_2%7D+++%5Cend%7Bbmatrix%7D+L+%5Ccirc+%5CGamma%5B%5Cvec+q%5D++++-++++%5Cleft%28+%5Cpartial_0++++%5Cbegin%7Bbmatrix%7D++++++%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+%5Cdot+q_1%7D+%5C%5C++++%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+%5Cdot+q_2%7D+++++++%5Cend%7Bbmatrix%7D+L+%5Ccirc+%5CGamma%5B%5Cvec+q%5D+%5Cright%29+Dt++++-++++%5Cleft%28++%5Cbegin%7Bbmatrix%7D++++++++%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+q_1%7D+%5Cleft%28%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+%5Cdot+q_1%7D++%5Cright%29++++++%26+%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+q_2%7D+%5Cleft%28%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+%5Cdot+q_1%7D++%5Cright%29++%5C%5C++++++%5C%5C+++++++++%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+q_1%7D+%5Cleft%28%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+%5Cdot+q_2%7D+%5Cright%29+++++%26+%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+q_2%7D+%5Cleft%28%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+%5Cdot+q_2%7D+%5Cright%29++%5C%5C+++%5Cend%7Bbmatrix%7D++++L+%5Ccirc+%5CGamma%5B%5Cvec+q%5D+%5Cright%29++++%5Cbegin%7Bbmatrix%7D++D+q_1+%5C%5C+D+q_2+%5Cend%7Bbmatrix%7D+%5C%5C++++++%5Cend%7Baligned%7D%7D&bg=ffffff&fg=333333&s=0&c=20201002)
![\displaystyle{ \begin{aligned} &\left( \begin{bmatrix} \frac{\partial}{\partial \dot q_1} \\ \frac{\partial}{\partial \dot q_2} \\ \end{bmatrix} \begin{bmatrix} \frac{\partial}{\partial \dot q_1} & \frac{\partial}{\partial \dot q_2} \\ \end{bmatrix} L \circ \Gamma[\vec q] \right)\begin{bmatrix} D^2 q_1 \\ D^2 q_2 \end{bmatrix} \\ &= \begin{bmatrix} \frac{\partial}{\partial q_1} \\ \frac{\partial}{\partial q_2} \end{bmatrix} L \circ \Gamma[\vec q] - \left( \partial_0 \begin{bmatrix} \frac{\partial}{\partial \dot q_1} \\ \frac{\partial}{\partial \dot q_2} \end{bmatrix} L \circ \Gamma[\vec q] \right) Dt - \left( \begin{bmatrix} \frac{\partial}{\partial \dot q_1} \\ \frac{\partial}{\partial \dot q_2} \end{bmatrix} \begin{bmatrix} \frac{\partial}{\partial q_1} & \frac{\partial}{\partial q_2} \end{bmatrix} L \circ \Gamma[\vec q] \right) \begin{bmatrix} D q_1 \\ D q_2 \end{bmatrix} \\ \end{aligned}}](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle%7B+%5Cbegin%7Baligned%7D+++++%26%5Cleft%28++++%5Cbegin%7Bbmatrix%7D++%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+%5Cdot+q_1%7D+%5C%5C++++%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+%5Cdot+q_2%7D+%5C%5C++++%5Cend%7Bbmatrix%7D+++++%5Cbegin%7Bbmatrix%7D++%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+%5Cdot+q_1%7D+%26++++%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+%5Cdot+q_2%7D+%5C%5C+++++++%5Cend%7Bbmatrix%7D+++++++++L+%5Ccirc+%5CGamma%5B%5Cvec+q%5D+%5Cright%29%5Cbegin%7Bbmatrix%7D++D%5E2+q_1+%5C%5C+D%5E2+q_2+%5Cend%7Bbmatrix%7D+%5C%5C++++++%26%3D+++++%5Cbegin%7Bbmatrix%7D+%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+q_1%7D+++++++%5C%5C++++%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+q_2%7D+++%5Cend%7Bbmatrix%7D+L+%5Ccirc+%5CGamma%5B%5Cvec+q%5D++++-++++%5Cleft%28+%5Cpartial_0++++%5Cbegin%7Bbmatrix%7D++++++%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+%5Cdot+q_1%7D+%5C%5C++++%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+%5Cdot+q_2%7D+++++++%5Cend%7Bbmatrix%7D+L+%5Ccirc+%5CGamma%5B%5Cvec+q%5D+%5Cright%29+Dt++++-++++%5Cleft%28++++%5Cbegin%7Bbmatrix%7D++++++++%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+%5Cdot+q_1%7D+%5C%5C++++%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+%5Cdot+q_2%7D+++++%5Cend%7Bbmatrix%7D++++++%5Cbegin%7Bbmatrix%7D++++++++%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+q_1%7D+++%26++++%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+q_2%7D+++++++++%5Cend%7Bbmatrix%7D++++L+%5Ccirc+%5CGamma%5B%5Cvec+q%5D+%5Cright%29++++%5Cbegin%7Bbmatrix%7D++D+q_1+%5C%5C+D+q_2+%5Cend%7Bbmatrix%7D+%5C%5C++++++%5Cend%7Baligned%7D%7D&bg=ffffff&fg=333333&s=0&c=20201002)
![\displaystyle{ \begin{aligned} &\left( \vec \partial_2 \vec \partial_2^T L \circ \Gamma[\vec q] \right) D^2 \vec q \\ &= \vec \partial_1 L \circ \Gamma[\vec q] - \left( \partial_0 \vec \partial_2 L \circ \Gamma[\vec q] \right) - \left( \vec \partial_2 \vec \partial_1^T L \circ \Gamma[\vec q] \right) D \vec q \\ \end{aligned}}](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle%7B+%5Cbegin%7Baligned%7D+++++%26%5Cleft%28+%5Cvec+%5Cpartial_2+%5Cvec+%5Cpartial_2%5ET+++++L+%5Ccirc+%5CGamma%5B%5Cvec+q%5D+%5Cright%29+D%5E2+%5Cvec+q+%5C%5C++++%26%3D+%5Cvec+%5Cpartial_1+L+%5Ccirc+%5CGamma%5B%5Cvec+q%5D++++-+%5Cleft%28+%5Cpartial_0+%5Cvec+%5Cpartial_2+L+%5Ccirc+%5CGamma%5B%5Cvec+q%5D+%5Cright%29+++++-+%5Cleft%28+%5Cvec+%5Cpartial_2+%5Cvec+%5Cpartial_1%5ET+L+%5Ccirc+%5CGamma%5B%5Cvec+q%5D+%5Cright%29+D+%5Cvec+q+%5C%5C++++++%5Cend%7Baligned%7D%7D&bg=ffffff&fg=333333&s=0&c=20201002)
![\displaystyle{ \left(D \Gamma[q] \right)(t) = \left( 1, Dq(t), D^2 q(t), ... \right) = \begin{bmatrix} 1 \\ Dq(t) \\ D^2 q(t) \\ ... \\ \end{bmatrix} \\ }](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle%7B++%5Cleft%28D+%5CGamma%5Bq%5D+%5Cright%29%28t%29+++%3D+%5Cleft%28+1%2C+Dq%28t%29%2C+D%5E2+q%28t%29%2C+...+%5Cright%29++%3D+%5Cbegin%7Bbmatrix%7D+1+%5C%5C+Dq%28t%29+%5C%5C+D%5E2+q%28t%29+%5C%5C+...+%5C%5C+%5Cend%7Bbmatrix%7D+%5C%5C+++%7D&bg=ffffff&fg=333333&s=0&c=20201002)
 = \left( t, q(t), D q(t), D^2 q(t), ... \right) = \begin{bmatrix} t \\ q(t) \\ D q(t) \\ D^2 q(t) \\ ... \\ \end{bmatrix} \\ }](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle%7B+%5CGamma%5Bq%5D%28t%29+%3D+%5Cleft%28+t%2C+q%28t%29%2C+D+q%28t%29%2C+D%5E2+q%28t%29%2C+...+%5Cright%29++%3D+%5Cbegin%7Bbmatrix%7D+t+%5C%5C+q%28t%29+%5C%5C+D+q%28t%29+%5C%5C+D%5E2+q%28t%29+%5C%5C+...+%5C%5C+%5Cend%7Bbmatrix%7D+%5C%5C+++%7D&bg=ffffff&fg=333333&s=0&c=20201002)
![\displaystyle{ \Gamma[q] = \begin{bmatrix} I \\ q \\ D q \\ D^2 q \\ ... \\ \end{bmatrix} \\ }](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle%7B+%5CGamma%5Bq%5D+%3D+%5Cbegin%7Bbmatrix%7D+I+%5C%5C+q+%5C%5C+D+q+%5C%5C+D%5E2+q+%5C%5C+...+%5C%5C+%5Cend%7Bbmatrix%7D+%5C%5C+++%7D&bg=ffffff&fg=333333&s=0&c=20201002) ,
, .
. = \left( t, \begin{bmatrix} q_1(t) \\ q_2(t) \end{bmatrix}, D \begin{bmatrix} q_1(t) \\ q_2(t) \end{bmatrix}, D^2 \begin{bmatrix} q_1(t) \\ q_2(t) \end{bmatrix}, ... \right) = \begin{bmatrix} t \\ \begin{bmatrix} q_1(t) \\ q_2(t) \end{bmatrix} \\ D \begin{bmatrix} q_1(t) \\ q_2(t) \end{bmatrix} \\ D^2 \begin{bmatrix} q_1(t) \\ q_2(t) \end{bmatrix} \\ ... \\ \end{bmatrix} \\ }](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle%7B+%5CGamma%5Bq_1%2C+q_2%5D%28t%29+%3D+%5Cleft%28+t%2C+%5Cbegin%7Bbmatrix%7D+q_1%28t%29+%5C%5C+q_2%28t%29+%5Cend%7Bbmatrix%7D%2C+++D+%5Cbegin%7Bbmatrix%7D+q_1%28t%29+%5C%5C+q_2%28t%29+%5Cend%7Bbmatrix%7D%2C+++D%5E2+%5Cbegin%7Bbmatrix%7D+q_1%28t%29+%5C%5C+q_2%28t%29+%5Cend%7Bbmatrix%7D%2C+++...+%5Cright%29+%3D+%5Cbegin%7Bbmatrix%7D+t+%5C%5C+%5Cbegin%7Bbmatrix%7D+q_1%28t%29+%5C%5C+q_2%28t%29+%5Cend%7Bbmatrix%7D+%5C%5C+++D+%5Cbegin%7Bbmatrix%7D+q_1%28t%29+%5C%5C+q_2%28t%29+%5Cend%7Bbmatrix%7D+%5C%5C+++D%5E2+%5Cbegin%7Bbmatrix%7D+q_1%28t%29+%5C%5C+q_2%28t%29+%5Cend%7Bbmatrix%7D+%5C%5C+++...+%5C%5C+%5Cend%7Bbmatrix%7D+%5C%5C+%7D&bg=ffffff&fg=333333&s=0&c=20201002)
![\displaystyle{ \begin{aligned} D ( \partial_2 L \circ \Gamma[q]) - (\partial_1 L \circ \Gamma[q]) &= 0 \\ \end{aligned}}](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle%7B+%5Cbegin%7Baligned%7D+D+%28+%5Cpartial_2+L+%5Ccirc+%5CGamma%5Bq%5D%29+-+%28%5Cpartial_1+L+%5Ccirc+%5CGamma%5Bq%5D%29+%26%3D+0+%5C%5C+%5Cend%7Baligned%7D%7D&bg=ffffff&fg=333333&s=0&c=20201002)

![\displaystyle{ \begin{aligned} D \left( \frac{\partial}{\partial \dot q_1} L \circ \Gamma[q_1, q_2] \right) - \left(\frac{\partial}{\partial q_1} L \circ \Gamma[q_1, q_2]\right) &= 0 \\ \end{aligned}}](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle%7B+%5Cbegin%7Baligned%7D+D+%5Cleft%28+%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+%5Cdot+q_1%7D+L+%5Ccirc+%5CGamma%5Bq_1%2C+q_2%5D+%5Cright%29+-+%5Cleft%28%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+q_1%7D+L+%5Ccirc+%5CGamma%5Bq_1%2C+q_2%5D%5Cright%29+%26%3D+0+%5C%5C+%5Cend%7Baligned%7D%7D&bg=ffffff&fg=333333&s=0&c=20201002)
![\displaystyle{ \begin{aligned} D \left( \frac{\partial}{\partial \dot q_2} L \circ \Gamma[q_1, q_2] \right) - \left(\frac{\partial}{\partial q_2} L \circ \Gamma[q_1, q_2]\right) &= 0 \\ \end{aligned}}](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle%7B+%5Cbegin%7Baligned%7D+D+%5Cleft%28+%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+%5Cdot+q_2%7D+L+%5Ccirc+%5CGamma%5Bq_1%2C+q_2%5D+%5Cright%29+-+%5Cleft%28%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+q_2%7D+L+%5Ccirc+%5CGamma%5Bq_1%2C+q_2%5D%5Cright%29+%26%3D+0+%5C%5C+%5Cend%7Baligned%7D%7D&bg=ffffff&fg=333333&s=0&c=20201002)
![\displaystyle{ \begin{aligned} \vec \partial_1 L \circ \Gamma[q] &= D ( \vec \partial_2 L \circ \Gamma[q]) \\ \\ \begin{bmatrix} \frac{\partial}{\partial q_1} \\ \frac{\partial}{\partial q_2} \end{bmatrix} L \circ \Gamma[q_1, q_2] &= D \left( \begin{bmatrix} \frac{\partial}{\partial \dot q_1} \\ \frac{\partial}{\partial \dot q_2} \end{bmatrix} L \circ \Gamma[q_1, q_2] \right) \\ \\ \frac{\partial}{\partial q_1} L \circ \Gamma[q_1, q_2] &= D \left(\frac{\partial}{\partial \dot q_1} L \circ \Gamma[q_1, q_2] \right) \\ \frac{\partial}{\partial q_2} L \circ \Gamma[q_1, q_2] &= D \left( \frac{\partial}{\partial \dot q_2} L \circ \Gamma[q_1, q_2] \right) \\ \\ \frac{\partial}{\partial q_1} L \circ \Gamma[q_1, q_2] &= \partial_0 \left(\frac{\partial}{\partial \dot q_1} L \circ \Gamma[q_1, q_2] \right) Dt \\ &+ \partial_{q_1} \left(\frac{\partial}{\partial \dot q_1} L \circ \Gamma[q_1, q_2] \right) D q_1 + \partial_{v_1} \left(\frac{\partial}{\partial \dot q_1} L \circ \Gamma[q_1, q_2] \right) D v_1 \\ &+ \partial_{q_2} \left(\frac{\partial}{\partial \dot q_1} L \circ \Gamma[q_1, q_2] \right) D q_2 + \partial_{v_2} \left(\frac{\partial}{\partial \dot q_1} L \circ \Gamma[q_1, q_2] \right) D v_2 \\ \frac{\partial}{\partial q_2} L \circ \Gamma[q_1, q_2] &= ... \\ \end{aligned}}](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle%7B+%5Cbegin%7Baligned%7D+++++++++%5Cvec+%5Cpartial_1+L+%5Ccirc+%5CGamma%5Bq%5D+%26%3D+D+%28+%5Cvec+%5Cpartial_2+L+%5Ccirc+%5CGamma%5Bq%5D%29+%5C%5C+%5C%5C+++++++++%5Cbegin%7Bbmatrix%7D+%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+q_1%7D++%5C%5C+%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial++q_2%7D++%5Cend%7Bbmatrix%7D+++++L+%5Ccirc+%5CGamma%5Bq_1%2C+q_2%5D+++++%26%3D+++++D+%5Cleft%28+%5Cbegin%7Bbmatrix%7D+%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+%5Cdot+q_1%7D++%5C%5C+%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+%5Cdot+q_2%7D++%5Cend%7Bbmatrix%7D+++++++L+%5Ccirc+%5CGamma%5Bq_1%2C+q_2%5D+%5Cright%29+++%5C%5C++%5C%5C++++++++%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+q_1%7D++++++L+%5Ccirc+%5CGamma%5Bq_1%2C+q_2%5D+++++%26%3D+++++D+%5Cleft%28%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+%5Cdot+q_1%7D+L+%5Ccirc+%5CGamma%5Bq_1%2C+q_2%5D+%5Cright%29+++%5C%5C+++++++%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial++q_2%7D++++++L+%5Ccirc+%5CGamma%5Bq_1%2C+q_2%5D+++++%26%3D+++++D+%5Cleft%28+%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+%5Cdot+q_2%7D++++++++L+%5Ccirc+%5CGamma%5Bq_1%2C+q_2%5D+%5Cright%29+++%5C%5C++%5C%5C++++++%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+q_1%7D++++++L+%5Ccirc+%5CGamma%5Bq_1%2C+q_2%5D+++++%26%3D+++++%5Cpartial_0+%5Cleft%28%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+%5Cdot+q_1%7D+L+%5Ccirc+%5CGamma%5Bq_1%2C+q_2%5D+%5Cright%29+Dt+%5C%5C++++%26%2B+%5Cpartial_%7Bq_1%7D+%5Cleft%28%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+%5Cdot+q_1%7D+L+%5Ccirc+%5CGamma%5Bq_1%2C+q_2%5D+%5Cright%29+D+q_1+++++%2B+%5Cpartial_%7Bv_1%7D+%5Cleft%28%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+%5Cdot+q_1%7D+L+%5Ccirc+%5CGamma%5Bq_1%2C+q_2%5D+%5Cright%29+D+v_1+%5C%5C++++%26%2B+%5Cpartial_%7Bq_2%7D+%5Cleft%28%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+%5Cdot+q_1%7D+L+%5Ccirc+%5CGamma%5Bq_1%2C+q_2%5D+%5Cright%29+D+q_2+++++%2B+%5Cpartial_%7Bv_2%7D+%5Cleft%28%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+%5Cdot+q_1%7D+L+%5Ccirc+%5CGamma%5Bq_1%2C+q_2%5D+%5Cright%29+D+v_2+++++++%5C%5C+++++++%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial++q_2%7D++++++L+%5Ccirc+%5CGamma%5Bq_1%2C+q_2%5D+++++%26%3D+...+%5C%5C++++++%5Cend%7Baligned%7D%7D&bg=ffffff&fg=333333&s=0&c=20201002)
![\displaystyle{\begin{aligned} \vec \partial_1 L \circ \Gamma[q_1, q_2] &= \partial_0 \left(\vec \partial_2 L \circ \Gamma[q_1, q_2] \right) Dt \\ &+ \frac{\partial}{\partial q_1} \left( \vec \partial_2 L \circ \Gamma[q_1, q_2] \right) D q_1 + \frac{\partial}{\partial q_2} \left( \vec \partial_2 L \circ \Gamma[q_1, q_2] \right) D q_2 \\ &+ \frac{\partial}{\partial \dot q_1} \left( \vec \partial_2 L \circ \Gamma[q_1, q_2] \right) D^2 q_1 + \frac{\partial}{\partial \dot q_2} \left( \vec \partial_2 L \circ \Gamma[q_1, q_2] \right) D^2 q_2 \\ \\ &= \partial_0 \left(\vec \partial_2 L \circ \Gamma[q_1, q_2] \right) Dt \\ &+ \begin{bmatrix} \frac{\partial}{\partial q_1} & \frac{\partial}{\partial q_2} \\ \end{bmatrix} \begin{bmatrix} \left( \vec \partial_2 L \circ \Gamma[q_1, q_2] \right) D q_1 \\ \left( \vec \partial_2 L \circ \Gamma[q_1, q_2] \right) D q_2 \\ \end{bmatrix} + \begin{bmatrix} \frac{\partial}{\partial \dot q_1} & \frac{\partial}{\partial \dot q_2} \\ \end{bmatrix} \begin{bmatrix} \left( \vec \partial_2 L \circ \Gamma[q_1, q_2] \right) D^2 q_1 \\ \left( \vec \partial_2 L \circ \Gamma[q_1, q_2] \right) D^2 q_2 \\ \end{bmatrix} \\ \\ \end{aligned}}](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle%7B%5Cbegin%7Baligned%7D++++%5Cvec+%5Cpartial_1++++L+%5Ccirc+%5CGamma%5Bq_1%2C+q_2%5D+++++%26%3D+++++%5Cpartial_0+%5Cleft%28%5Cvec+%5Cpartial_2+L+%5Ccirc+%5CGamma%5Bq_1%2C+q_2%5D+%5Cright%29+Dt+%5C%5C++++%26%2B+%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+q_1%7D++%5Cleft%28++++%5Cvec+%5Cpartial_2++++L+%5Ccirc+%5CGamma%5Bq_1%2C+q_2%5D+%5Cright%29+D+q_1+++++++%2B+%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+q_2%7D++%5Cleft%28++++%5Cvec+%5Cpartial_2+++++L+%5Ccirc+%5CGamma%5Bq_1%2C+q_2%5D+%5Cright%29+D+q_2+%5C%5C++++%26%2B+%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+%5Cdot+q_1%7D++%5Cleft%28++++%5Cvec+%5Cpartial_2+++++L+%5Ccirc+%5CGamma%5Bq_1%2C+q_2%5D+%5Cright%29+D%5E2+q_1+++++%2B+%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+%5Cdot+q_2%7D+%5Cleft%28++++%5Cvec+%5Cpartial_2++L+%5Ccirc+%5CGamma%5Bq_1%2C+q_2%5D+%5Cright%29+D%5E2+q_2+++++++%5C%5C+%5C%5C++++%26%3D+%5Cpartial_0+%5Cleft%28%5Cvec+%5Cpartial_2+L+%5Ccirc+%5CGamma%5Bq_1%2C+q_2%5D+%5Cright%29+Dt+%5C%5C++++%26%2B+%5Cbegin%7Bbmatrix%7D++%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+q_1%7D+%26++%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+q_2%7D+%5C%5C+%5Cend%7Bbmatrix%7D+++++++%5Cbegin%7Bbmatrix%7D+%5Cleft%28++++%5Cvec+%5Cpartial_2++++L+%5Ccirc+%5CGamma%5Bq_1%2C+q_2%5D+%5Cright%29+D+q_1++++%5C%5C+%5Cleft%28++++%5Cvec+%5Cpartial_2+++++L+%5Ccirc+%5CGamma%5Bq_1%2C+q_2%5D+%5Cright%29+D+q_2+%5C%5C+%5Cend%7Bbmatrix%7D++++++%2B+++++%5Cbegin%7Bbmatrix%7D++%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+%5Cdot+q_1%7D+%26++%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+%5Cdot+q_2%7D+%5C%5C+%5Cend%7Bbmatrix%7D+++++++++%5Cbegin%7Bbmatrix%7D+%5Cleft%28++++%5Cvec+%5Cpartial_2++++L+%5Ccirc+%5CGamma%5Bq_1%2C+q_2%5D+%5Cright%29+D%5E2+q_1++++%5C%5C+%5Cleft%28++++%5Cvec+%5Cpartial_2+++++L+%5Ccirc+%5CGamma%5Bq_1%2C+q_2%5D+%5Cright%29+D%5E2+q_2+%5C%5C+%5Cend%7Bbmatrix%7D+%5C%5C++++++++%5C%5C+++++++++++%5Cend%7Baligned%7D%7D&bg=ffffff&fg=333333&s=0&c=20201002)
![\displaystyle{\begin{aligned} &= \partial_0 \left(\vec \partial_2 L \circ \Gamma[q_1, q_2] \right) Dt \\ &+ \begin{bmatrix} \frac{\partial}{\partial q_1} & \frac{\partial}{\partial q_2} \\ \end{bmatrix} \left( \vec \partial_2 L \circ \Gamma[q_1, q_2] \right) D \begin{bmatrix} q_1 \\ q_2 \\ \end{bmatrix} + \begin{bmatrix} \frac{\partial}{\partial \dot q_1} & \frac{\partial}{\partial \dot q_2} \\ \end{bmatrix} \left( \vec \partial_2 L \circ \Gamma[q_1, q_2] \right) D^2 \begin{bmatrix} q_1 \\ q_2 \\ \end{bmatrix} \\ \\ \vec \partial_1 L \circ \Gamma[\vec q] &= \partial_0 \left(\vec \partial_2 L \circ \Gamma[q_1, q_2] \right) + \vec \partial_1^T \left( \vec \partial_2 L \circ \Gamma[\vec q] \right) D \vec q + \vec \partial_2^T \left( \vec \partial_2 L \circ \Gamma[\vec q] \right) D^2 \vec q \\ \end{aligned}}](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle%7B%5Cbegin%7Baligned%7D++++%26%3D+%5Cpartial_0+%5Cleft%28%5Cvec+%5Cpartial_2+L+%5Ccirc+%5CGamma%5Bq_1%2C+q_2%5D+%5Cright%29+Dt+%5C%5C++++%26%2B+%5Cbegin%7Bbmatrix%7D++%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+q_1%7D+%26++%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+q_2%7D+%5C%5C+%5Cend%7Bbmatrix%7D+++++++%5Cleft%28++++%5Cvec+%5Cpartial_2++++L+%5Ccirc+%5CGamma%5Bq_1%2C+q_2%5D+%5Cright%29+D+%5Cbegin%7Bbmatrix%7D+q_1++++%5C%5C++q_2+%5C%5C+%5Cend%7Bbmatrix%7D++++++%2B+++++%5Cbegin%7Bbmatrix%7D++%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+%5Cdot+q_1%7D+%26++%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+%5Cdot+q_2%7D+%5C%5C+%5Cend%7Bbmatrix%7D+++++++++%5Cleft%28++++%5Cvec+%5Cpartial_2++++L+%5Ccirc+%5CGamma%5Bq_1%2C+q_2%5D+%5Cright%29+D%5E2+%5Cbegin%7Bbmatrix%7D+q_1++++%5C%5C++q_2+%5C%5C+%5Cend%7Bbmatrix%7D+%5C%5C+++++++%5C%5C++++%5Cvec+%5Cpartial_1++++L+%5Ccirc+%5CGamma%5B%5Cvec+q%5D+++++++%26%3D+%5Cpartial_0+%5Cleft%28%5Cvec+%5Cpartial_2+L+%5Ccirc+%5CGamma%5Bq_1%2C+q_2%5D+%5Cright%29+%2B+%5Cvec+%5Cpartial_1%5ET+%5Cleft%28+%5Cvec+%5Cpartial_2+L+%5Ccirc+%5CGamma%5B%5Cvec+q%5D+%5Cright%29+D+%5Cvec+q+++++%2B+%5Cvec+%5Cpartial_2%5ET+%5Cleft%28+%5Cvec+%5Cpartial_2+L+%5Ccirc+%5CGamma%5B%5Cvec+q%5D+%5Cright%29+D%5E2+%5Cvec+q+%5C%5C++++++++%5Cend%7Baligned%7D%7D&bg=ffffff&fg=333333&s=0&c=20201002)
 into each equation. Instead, each row of
into each equation. Instead, each row of  should match only one of the two equations.
should match only one of the two equations. . If we are
. If we are , then
, then![\displaystyle{D^2 q = A \circ \Gamma[q]}](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle%7BD%5E2+q+%3D+A+%5Ccirc+%5CGamma%5Bq%5D%7D&bg=ffffff&fg=333333&s=0&c=20201002)
![\displaystyle{D^3 q = D( A \circ \Gamma[q]) = D_t A \circ \Gamma[q]}](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle%7BD%5E3+q+%3D+D%28+A+%5Ccirc+%5CGamma%5Bq%5D%29+%3D+D_t+A+%5Ccirc+%5CGamma%5Bq%5D%7D&bg=ffffff&fg=333333&s=0&c=20201002)
 . Each of these functions depends on lower-derivative components of the local tuple. All we need to deduce the path from the state is a function that gives the next-higher derivative component of the local description from the state. We use the Lagrange equations to find this function.
. Each of these functions depends on lower-derivative components of the local tuple. All we need to deduce the path from the state is a function that gives the next-higher derivative component of the local description from the state. We use the Lagrange equations to find this function.![\displaystyle{ D_t F \circ \Gamma[q] = D(F \circ \Gamma[q]) }](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle%7B++D_t+F+%5Ccirc+%5CGamma%5Bq%5D+%3D+D%28F+%5Ccirc+%5CGamma%5Bq%5D%29++%7D&bg=ffffff&fg=333333&s=0&c=20201002)

![\displaystyle{ \begin{aligned} D_t F \circ \Gamma[q] (t) &= \partial_0 F(t, q, v, a, ...) + \partial_1 F(t, q, v, a, ...) v(t) + \partial_2 F(t, q, v, a, ...) a(t) + ... \\ \end{aligned} }](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle%7B++%5Cbegin%7Baligned%7D++D_t+F+%5Ccirc+%5CGamma%5Bq%5D+%28t%29++%26%3D+%5Cpartial_0+F%28t%2C+q%2C+v%2C+a%2C+...%29+%2B+%5Cpartial_1+F%28t%2C+q%2C+v%2C+a%2C+...%29+v%28t%29+%2B+%5Cpartial_2+F%28t%2C+q%2C+v%2C+a%2C+...%29+a%28t%29+%2B+...+++%5C%5C+++%5Cend%7Baligned%7D++%7D&bg=ffffff&fg=333333&s=0&c=20201002)
![\displaystyle{ \begin{aligned} D ( \partial_2 L \circ \Gamma[q]) - (\partial_1 L \circ \Gamma[q]) &= 0 \\ \end{aligned}}](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle%7B+%5Cbegin%7Baligned%7D+++++D+%28+%5Cpartial_2+L+%5Ccirc+%5CGamma%5Bq%5D%29+-+%28%5Cpartial_1+L+%5Ccirc+%5CGamma%5Bq%5D%29+%26%3D+0+%5C%5C+++++%5Cend%7Baligned%7D%7D&bg=ffffff&fg=333333&s=0&c=20201002)

 must be linear in the generalized velocities
must be linear in the generalized velocities 
 nor
nor  depend on the generalized velocities:
depend on the generalized velocities:  .
.  then
then





 be a function of
be a function of  and
and 
 are identically zero, …
are identically zero, … into the Lagrange equation:
into the Lagrange equation:![\displaystyle{ \begin{aligned} &\frac{d}{dt} \left( \frac{\partial}{\partial \dot q} D_t F (t, q, Dq, ...) \right) - \frac{\partial}{\partial q} D_t F (t, q, Dq, ...) \\ \\ &= \frac{d}{dt} \left[ \frac{\partial}{\partial \dot q} \left( \partial_0 F(t, q, v, a, ...) + \partial_1 F(t, q, v, a, ...) v + \partial_2 F(t, q, v, a, ...) a + ... \right) \right] \\ &- \frac{\partial}{\partial q} \left( \partial_0 F(t, q, v, a, ...) + \partial_1 F(t, q, v, a, ...) v + \partial_2 F(t, q, v, a, ...) a + ... \right) \\ \\ &=\frac{d}{dt} \left[ \partial_2 \partial_0 F + \partial_2 (v \partial_1 F) + \partial_2 (a \partial_2 F) + ... \right] \\ &- \left[ \partial_1 \partial_0 F + \partial_1 (v \partial_1 F) + \partial_1 (a \partial_2 F) + ... \right] \\ \\ &= \partial_0 \left[ \partial_1 \partial_0 F + \partial_1 (v \partial_1 F) + \partial_1 (a \partial_2 F) + ... \right] \\ &+ \partial_1 \left[ \partial_1 \partial_0 F + \partial_1 (v \partial_1 F) + \partial_1 (a \partial_2 F) + ... \right] v \\ &+ \partial_2 \left[ \partial_1 \partial_0 F + \partial_1 (v \partial_1 F) + \partial_1 (a \partial_2 F) + ... \right] a + ... \\ &- \left[ \partial_1 \partial_0 F + \partial_1 (v \partial_1 F) + \partial_1 (a \partial_2 F) + ... \right] \\ \\ &= ... \\ \end{aligned} }](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle%7B+++++%5Cbegin%7Baligned%7D+++++%26%5Cfrac%7Bd%7D%7Bdt%7D+%5Cleft%28+%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+%5Cdot+q%7D+++++D_t+F+%28t%2C+q%2C+Dq%2C+...%29++%5Cright%29+-+%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+q%7D+++++D_t+F+%28t%2C+q%2C+Dq%2C+...%29+%5C%5C+%5C%5C++++%26%3D+%5Cfrac%7Bd%7D%7Bdt%7D+%5Cleft%5B+%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+%5Cdot+q%7D+++++%5Cleft%28+%5Cpartial_0+F%28t%2C+q%2C+v%2C+a%2C+...%29+%2B+%5Cpartial_1+F%28t%2C+q%2C+v%2C+a%2C+...%29+v+%2B+%5Cpartial_2+F%28t%2C+q%2C+v%2C+a%2C+...%29+a+%2B+...+%5Cright%29+%5Cright%5D+%5C%5C++++%26-+%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+q%7D+++++%5Cleft%28+%5Cpartial_0+F%28t%2C+q%2C+v%2C+a%2C+...%29+%2B+%5Cpartial_1+F%28t%2C+q%2C+v%2C+a%2C+...%29+v+%2B+%5Cpartial_2+F%28t%2C+q%2C+v%2C+a%2C+...%29+a+%2B+...+%5Cright%29+++%5C%5C+++++%5C%5C++++%26%3D%5Cfrac%7Bd%7D%7Bdt%7D+%5Cleft%5B++++++++%5Cpartial_2+%5Cpartial_0+F++%2B+%5Cpartial_2+%28v+%5Cpartial_1+F%29+++%2B+%5Cpartial_2+%28a+%5Cpartial_2+F%29+%2B+...++%5Cright%5D+%5C%5C++++%26-+%5Cleft%5B++++%5Cpartial_1+%5Cpartial_0+F++%2B+%5Cpartial_1+%28v+%5Cpartial_1+F%29+++%2B+%5Cpartial_1+%28a+%5Cpartial_2+F%29+%2B+...+%5Cright%5D+++%5C%5C++++%5C%5C++++%26%3D+%5Cpartial_0+%5Cleft%5B++++++++++%5Cpartial_1+%5Cpartial_0+F++%2B+%5Cpartial_1+%28v+%5Cpartial_1+F%29+++%2B+%5Cpartial_1+%28a+%5Cpartial_2+F%29+%2B+...++%5Cright%5D+%5C%5C+++++%26%2B+%5Cpartial_1+%5Cleft%5B++++++++++%5Cpartial_1+%5Cpartial_0+F++%2B+%5Cpartial_1+%28v+%5Cpartial_1+F%29+++%2B+%5Cpartial_1+%28a+%5Cpartial_2+F%29+%2B+...+++%5Cright%5D+v+%5C%5C++++%26%2B+%5Cpartial_2+%5Cleft%5B++++++++++%5Cpartial_1+%5Cpartial_0+F++%2B+%5Cpartial_1+%28v+%5Cpartial_1+F%29+++%2B+%5Cpartial_1+%28a+%5Cpartial_2+F%29+%2B+...+++%5Cright%5D+a+%2B+...+%5C%5C++++%26-+%5Cleft%5B++++++%5Cpartial_1+%5Cpartial_0+F++%2B+%5Cpartial_1+%28v+%5Cpartial_1+F%29+++%2B+%5Cpartial_1+%28a+%5Cpartial_2+F%29+%2B+...++%5Cright%5D+++%5C%5C++++++++%5C%5C++++%26%3D+...+%5C%5C+++++%5Cend%7Baligned%7D++++%7D&bg=ffffff&fg=333333&s=0&c=20201002)
 :
:
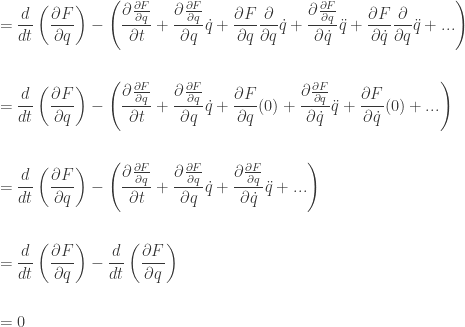
![\displaystyle{\begin{aligned} &\frac{\partial \dot F}{\partial \dot q} \\ \\ &= \frac{\partial }{\partial \dot q} \left( \frac{\partial F}{\partial t} + \frac{\partial F}{\partial q} \dot q + \frac{\partial F}{\partial \dot q} \ddot q + ... \right) \\ \\ &= \frac{\partial }{\partial \dot q} \frac{\partial F}{\partial t} + \left( \frac{\partial }{\partial \dot q}\frac{\partial F}{\partial q} \right) \dot q + \frac{\partial F}{\partial q} \frac{\partial }{\partial \dot q}\dot q + \left( \frac{\partial }{\partial \dot q}\frac{\partial F}{\partial \dot q} \right) \ddot q + \frac{\partial F}{\partial \dot q} \frac{\partial }{\partial \dot q}\ddot q + ... \\ \\ &= \frac{\partial }{\partial \dot q} \frac{\partial F}{\partial t} + \left( \frac{\partial }{\partial \dot q}\frac{\partial F}{\partial q} \right) \dot q + \frac{\partial F}{\partial q} (1) + \left( \frac{\partial }{\partial \dot q}\frac{\partial F}{\partial \dot q} \right) \ddot q + \frac{\partial F}{\partial \dot q} (0) + ... \\ \\ &= \frac{\partial }{\partial \dot q} \frac{\partial F}{\partial t} + \left( \frac{\partial }{\partial \dot q}\frac{\partial F}{\partial q} \right)\dot q + \frac{\partial F}{\partial q} + \left( \frac{\partial }{\partial \dot q}\frac{\partial F}{\partial \dot q}\right) \ddot q + ... \\ \\ &= \left[ \frac{\partial \frac{\partial }{\partial \dot q} F}{\partial t} + \left( \frac{\partial \frac{\partial }{\partial \dot q} F}{\partial q} \right)\dot q + \left( \frac{\partial \frac{\partial }{\partial \dot q} F}{\partial \dot q}\right) \ddot q + ... \right] + \frac{\partial F}{\partial q} \\ \\ &= \frac{d}{dt} \frac{\partial F }{\partial \dot q} + \frac{\partial F}{\partial q} \\ \\ \end{aligned}}](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle%7B%5Cbegin%7Baligned%7D++++++++++++%26%5Cfrac%7B%5Cpartial+%5Cdot+F%7D%7B%5Cpartial+%5Cdot+q%7D+%5C%5C+%5C%5C++++++%26%3D+++++%5Cfrac%7B%5Cpartial+%7D%7B%5Cpartial+%5Cdot+q%7D+%5Cleft%28+%5Cfrac%7B%5Cpartial+F%7D%7B%5Cpartial+t%7D+++++%2B+%5Cfrac%7B%5Cpartial+F%7D%7B%5Cpartial+q%7D+%5Cdot+q+%2B+%5Cfrac%7B%5Cpartial+F%7D%7B%5Cpartial+%5Cdot+q%7D+%5Cddot+q+%2B+...+%5Cright%29+++%5C%5C+%5C%5C++++%26%3D+%5Cfrac%7B%5Cpartial+%7D%7B%5Cpartial+%5Cdot+q%7D+%5Cfrac%7B%5Cpartial+F%7D%7B%5Cpartial+t%7D+++++%2B+%5Cleft%28+%5Cfrac%7B%5Cpartial+%7D%7B%5Cpartial+%5Cdot+q%7D%5Cfrac%7B%5Cpartial+F%7D%7B%5Cpartial+q%7D+%5Cright%29+%5Cdot+q+++%2B+%5Cfrac%7B%5Cpartial+F%7D%7B%5Cpartial+q%7D+%5Cfrac%7B%5Cpartial+%7D%7B%5Cpartial+%5Cdot+q%7D%5Cdot+q++++++%2B+%5Cleft%28+%5Cfrac%7B%5Cpartial+%7D%7B%5Cpartial+%5Cdot+q%7D%5Cfrac%7B%5Cpartial+F%7D%7B%5Cpartial+%5Cdot+q%7D+%5Cright%29+%5Cddot+q++++%2B+%5Cfrac%7B%5Cpartial+F%7D%7B%5Cpartial+%5Cdot+q%7D+%5Cfrac%7B%5Cpartial+%7D%7B%5Cpartial+%5Cdot+q%7D%5Cddot+q+++++%2B+...+%5C%5C+%5C%5C++++++++%26%3D+%5Cfrac%7B%5Cpartial+%7D%7B%5Cpartial+%5Cdot+q%7D+%5Cfrac%7B%5Cpartial+F%7D%7B%5Cpartial+t%7D+++++%2B+%5Cleft%28+%5Cfrac%7B%5Cpartial+%7D%7B%5Cpartial+%5Cdot+q%7D%5Cfrac%7B%5Cpartial+F%7D%7B%5Cpartial+q%7D+%5Cright%29+%5Cdot+q+++%2B+%5Cfrac%7B%5Cpartial+F%7D%7B%5Cpartial+q%7D+%281%29++++++%2B+%5Cleft%28+%5Cfrac%7B%5Cpartial+%7D%7B%5Cpartial+%5Cdot+q%7D%5Cfrac%7B%5Cpartial+F%7D%7B%5Cpartial+%5Cdot+q%7D+%5Cright%29+%5Cddot+q++++%2B+%5Cfrac%7B%5Cpartial+F%7D%7B%5Cpartial+%5Cdot+q%7D+%280%29+++++%2B+...+%5C%5C+%5C%5C++++++%26%3D+%5Cfrac%7B%5Cpartial+%7D%7B%5Cpartial+%5Cdot+q%7D+%5Cfrac%7B%5Cpartial+F%7D%7B%5Cpartial+t%7D+++++%2B+%5Cleft%28+%5Cfrac%7B%5Cpartial+%7D%7B%5Cpartial+%5Cdot+q%7D%5Cfrac%7B%5Cpartial+F%7D%7B%5Cpartial+q%7D+%5Cright%29%5Cdot+q+++%2B+%5Cfrac%7B%5Cpartial+F%7D%7B%5Cpartial+q%7D+++++++%2B+%5Cleft%28+%5Cfrac%7B%5Cpartial+%7D%7B%5Cpartial+%5Cdot+q%7D%5Cfrac%7B%5Cpartial+F%7D%7B%5Cpartial+%5Cdot+q%7D%5Cright%29+%5Cddot+q+++++++++%2B+...+%5C%5C+%5C%5C++++++++++++%26%3D+++++++%5Cleft%5B+%5Cfrac%7B%5Cpartial+%5Cfrac%7B%5Cpartial+%7D%7B%5Cpartial+%5Cdot+q%7D+F%7D%7B%5Cpartial+t%7D+++++%2B+%5Cleft%28+%5Cfrac%7B%5Cpartial+%5Cfrac%7B%5Cpartial+%7D%7B%5Cpartial+%5Cdot+q%7D+F%7D%7B%5Cpartial+q%7D+%5Cright%29%5Cdot+q+++++++++%2B+%5Cleft%28+%5Cfrac%7B%5Cpartial+%5Cfrac%7B%5Cpartial+%7D%7B%5Cpartial+%5Cdot+q%7D+F%7D%7B%5Cpartial+%5Cdot+q%7D%5Cright%29+%5Cddot+q++++++%2B+...+%5Cright%5D++++++%2B+%5Cfrac%7B%5Cpartial+F%7D%7B%5Cpartial+q%7D+++++%5C%5C+%5C%5C++++++++++%26%3D+%5Cfrac%7Bd%7D%7Bdt%7D+%5Cfrac%7B%5Cpartial+F+%7D%7B%5Cpartial+%5Cdot+q%7D+++++%2B+%5Cfrac%7B%5Cpartial+F%7D%7B%5Cpartial+q%7D++++++%5C%5C+%5C%5C++++%5Cend%7Baligned%7D%7D&bg=ffffff&fg=333333&s=0&c=20201002)
 depends on
depends on  only, then
only, then  will depend on
will depend on  only.
only.

![\displaystyle{ \begin{aligned} &D_t (HG) \circ \Gamma[q] (t) \\ \end{aligned} }](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle%7B++%5Cbegin%7Baligned%7D++%26D_t+%28HG%29+%5Ccirc+%5CGamma%5Bq%5D+%28t%29+%5C%5C++%5Cend%7Baligned%7D++%7D&bg=ffffff&fg=333333&s=0&c=20201002)
![\displaystyle{ \begin{aligned} &= \partial_0 \left[ (H \circ G) (t, q, v, a, ...) \right] \\ &+ \partial_1 \left[ (H \circ G) (t, q, v, a, ...) \right] v(t) \\ &+ \partial_2 \left[ (H \circ G) (t, q, v, a, ...) \right] a(t) + ... \\ \end{aligned} }](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle%7B++%5Cbegin%7Baligned%7D++++++++%26%3D+%5Cpartial_0+%5Cleft%5B+%28H+%5Ccirc+G%29+%28t%2C+q%2C+v%2C+a%2C+...%29+%5Cright%5D+%5C%5C+++++%26%2B+%5Cpartial_1+%5Cleft%5B+%28H+%5Ccirc+G%29+%28t%2C+q%2C+v%2C+a%2C+...%29+%5Cright%5D+v%28t%29+%5C%5C+++++%26%2B+%5Cpartial_2+%5Cleft%5B+%28H+%5Ccirc+G%29+%28t%2C+q%2C+v%2C+a%2C+...%29+%5Cright%5D+a%28t%29+%2B+...+%5C%5C+++++++%5Cend%7Baligned%7D++%7D&bg=ffffff&fg=333333&s=0&c=20201002)
![\displaystyle{ \begin{aligned} &= \partial_0 \left[ H (G (t, q, v, a, ...)) \right] \\ &+ \partial_1 \left[ H (G (t, q, v, a, ...)) \right] v(t) \\ &+ \partial_2 \left[ H (G (t, q, v, a, ...)) \right] a(t) + ... \\ \end{aligned} }](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle%7B++%5Cbegin%7Baligned%7D++++++++%26%3D+%5Cpartial_0+%5Cleft%5B+H+%28G+%28t%2C+q%2C+v%2C+a%2C+...%29%29+%5Cright%5D+%5C%5C+++++%26%2B+%5Cpartial_1+%5Cleft%5B+H+%28G+%28t%2C+q%2C+v%2C+a%2C+...%29%29+%5Cright%5D+v%28t%29+%5C%5C+++++%26%2B+%5Cpartial_2+%5Cleft%5B+H+%28G+%28t%2C+q%2C+v%2C+a%2C+...%29%29+%5Cright%5D+a%28t%29+%2B+...+%5C%5C+++++++%5Cend%7Baligned%7D++%7D&bg=ffffff&fg=333333&s=0&c=20201002)

![\displaystyle{ \begin{aligned} &= D (H (G (t, q, v, a, ...))) \left[ \partial_0 G (t, q, ...) + \partial_1 G (t, q, ...) v(t) + \partial_2 G (t, q, ...) a(t) + ... \right] \\ \end{aligned} }](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle%7B++%5Cbegin%7Baligned%7D++++++++%26%3D+D+%28H+%28G+%28t%2C+q%2C+v%2C+a%2C+...%29%29%29+%5Cleft%5B+%5Cpartial_0+G+%28t%2C+q%2C+...%29+++%2B++%5Cpartial_1+G+%28t%2C+q%2C+...%29+v%28t%29+++%2B++%5Cpartial_2+G+%28t%2C+q%2C+...%29+a%28t%29+%2B+...+%5Cright%5D+%5C%5C++%5Cend%7Baligned%7D++%7D&bg=ffffff&fg=333333&s=0&c=20201002)
![\displaystyle{ \begin{aligned} &= D ( (H \circ G) \circ \Gamma[q] (t) ) D_t G \circ \Gamma[q] (t) \\ \end{aligned} }](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle%7B++%5Cbegin%7Baligned%7D++++++++%26%3D+D+%28+%28H+%5Ccirc+G%29+%5Ccirc+%5CGamma%5Bq%5D+%28t%29+%29+D_t+G+%5Ccirc+%5CGamma%5Bq%5D+%28t%29+%5C%5C++%5Cend%7Baligned%7D++%7D&bg=ffffff&fg=333333&s=0&c=20201002)
![\displaystyle{ \begin{aligned} &= D_G (H \circ G) \circ \Gamma[q] (t) D_t G \circ \Gamma[q] (t) \\ \end{aligned} }](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle%7B++%5Cbegin%7Baligned%7D++++++++%26%3D+D_G++%28H+%5Ccirc+G%29++%5Ccirc+%5CGamma%5Bq%5D+%28t%29+D_t+G+%5Ccirc+%5CGamma%5Bq%5D+%28t%29+%5C%5C++%5Cend%7Baligned%7D++%7D&bg=ffffff&fg=333333&s=0&c=20201002)
![\displaystyle{ (fg) [q] \equiv f[q] g[q]}](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle%7B+%28fg%29+%5Bq%5D+%5Cequiv+f%5Bq%5D+g%5Bq%5D%7D&bg=ffffff&fg=333333&s=0&c=20201002)
![\displaystyle{ \begin{aligned} &= \{ [D_G (H \circ G)] D_t G \} \circ \Gamma[q] (t) \\ \end{aligned} }](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle%7B++%5Cbegin%7Baligned%7D++++++++%26%3D+%5C%7B+%5BD_G++%28H+%5Ccirc+G%29%5D+D_t+G+%5C%7D+%5Ccirc+%5CGamma%5Bq%5D+%28t%29+%5C%5C++%5Cend%7Baligned%7D++%7D&bg=ffffff&fg=333333&s=0&c=20201002)


![\displaystyle{ \begin{aligned} &D_t (c F) \circ \Gamma[q] (t) \\ \end{aligned} }](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle%7B++%5Cbegin%7Baligned%7D++%26D_t+%28c+F%29+%5Ccirc+%5CGamma%5Bq%5D+%28t%29+%5C%5C++%5Cend%7Baligned%7D++%7D&bg=ffffff&fg=333333&s=0&c=20201002)
![\displaystyle{ \begin{aligned} &= \partial_0 \left[c F(t, q, v, a, ...) \right] + \partial_1 \left[c F(t, q, v, a, ...) \right] v(t) + \partial_2 \left[c F(t, q, v, a, ...) \right] a(t) + ... \end{aligned} }](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle%7B++%5Cbegin%7Baligned%7D++++++%26%3D+%5Cpartial_0+%5Cleft%5Bc+F%28t%2C+q%2C+v%2C+a%2C+...%29+%5Cright%5D+++++%2B+%5Cpartial_1+%5Cleft%5Bc+F%28t%2C+q%2C+v%2C+a%2C+...%29+%5Cright%5D+v%28t%29+++++%2B+%5Cpartial_2+%5Cleft%5Bc+F%28t%2C+q%2C+v%2C+a%2C+...%29+%5Cright%5D+a%28t%29+%2B+...+%5Cend%7Baligned%7D++%7D&bg=ffffff&fg=333333&s=0&c=20201002)

![\displaystyle{ \begin{aligned} &= c \left[ \partial_0 F(t, q, v, a, ...) + \partial_1 F(t, q, v, a, ...) v(t) + \partial_2 F(t, q, v, a, ...) a(t) + ... \right] \end{aligned} }](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle%7B++%5Cbegin%7Baligned%7D++++++%26%3D+c+%5Cleft%5B+%5Cpartial_0+F%28t%2C+q%2C+v%2C+a%2C+...%29+%2B+%5Cpartial_1+F%28t%2C+q%2C+v%2C+a%2C+...%29+v%28t%29+%2B+%5Cpartial_2+F%28t%2C+q%2C+v%2C+a%2C+...%29+a%28t%29+%2B+...+%5Cright%5D+%5Cend%7Baligned%7D++%7D&bg=ffffff&fg=333333&s=0&c=20201002)
![\displaystyle{ \begin{aligned} &= c D_t F \circ \Gamma[q] (t) \\ \end{aligned} }](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle%7B++%5Cbegin%7Baligned%7D++%26%3D+c+D_t+F+%5Ccirc+%5CGamma%5Bq%5D+%28t%29+%5C%5C++%5Cend%7Baligned%7D++%7D&bg=ffffff&fg=333333&s=0&c=20201002)
![\displaystyle{ \begin{aligned} &D_t (FG) \circ \Gamma[q] (t) \\ \end{aligned} }](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle%7B++%5Cbegin%7Baligned%7D++%26D_t+%28FG%29+%5Ccirc+%5CGamma%5Bq%5D+%28t%29+%5C%5C++%5Cend%7Baligned%7D++%7D&bg=ffffff&fg=333333&s=0&c=20201002)
![\displaystyle{ \begin{aligned} &= \partial_0 \left[ F(t, q, v, a, ...) G(t, q, v, a, ...) \right] \\ &+ \partial_1 \left[ F(t, q, v, a, ...) G(t, q, v, a, ...) \right] v(t) \\ &+ \partial_2 \left[ F(t, q, v, a, ...) G(t, q, v, a, ...) \right] a(t) + ... \\ \end{aligned} }](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle%7B++%5Cbegin%7Baligned%7D++++++%26%3D+%5Cpartial_0+%5Cleft%5B+F%28t%2C+q%2C+v%2C+a%2C+...%29+G%28t%2C+q%2C+v%2C+a%2C+...%29+%5Cright%5D+%5C%5C+++%26%2B+%5Cpartial_1+%5Cleft%5B+F%28t%2C+q%2C+v%2C+a%2C+...%29+G%28t%2C+q%2C+v%2C+a%2C+...%29+%5Cright%5D+v%28t%29+%5C%5C+++%26%2B+%5Cpartial_2+%5Cleft%5B+F%28t%2C+q%2C+v%2C+a%2C+...%29+G%28t%2C+q%2C+v%2C+a%2C+...%29+%5Cright%5D+a%28t%29+%2B+...+%5C%5C+++++%5Cend%7Baligned%7D++%7D&bg=ffffff&fg=333333&s=0&c=20201002)
![\displaystyle{ \begin{aligned} &= \left[ \partial_0 F(t, q, v, a, ...) \right] G(t, q, v, a, ...) + F(t, q, v, a, ...) \partial_0 G(t, q, v, a, ...) \\ &+ \left\{ \left[ \partial_1 F(t, q, v, a, ...) \right] G(t, q, v, a, ...) + F(t, q, v, a, ...) \partial_1 G(t, q, v, a, ...) \right\} v(t) \\ &+ \left\{ \left[ \partial_2 F(t, q, v, a, ...) \right] G(t, q, v, a, ...) + F(t, q, v, a, ...) \partial_2 G(t, q, v, a, ...) \right\} a(t) + ... \\ \end{aligned} }](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle%7B++%5Cbegin%7Baligned%7D++++++%26%3D+%5Cleft%5B+%5Cpartial_0+F%28t%2C+q%2C+v%2C+a%2C+...%29+%5Cright%5D+G%28t%2C+q%2C+v%2C+a%2C+...%29+%2B+F%28t%2C+q%2C+v%2C+a%2C+...%29+%5Cpartial_0+G%28t%2C+q%2C+v%2C+a%2C+...%29+%5C%5C+++%26%2B+%5Cleft%5C%7B+%5Cleft%5B+%5Cpartial_1+F%28t%2C+q%2C+v%2C+a%2C+...%29+%5Cright%5D+G%28t%2C+q%2C+v%2C+a%2C+...%29+%2B+F%28t%2C+q%2C+v%2C+a%2C+...%29+%5Cpartial_1+G%28t%2C+q%2C+v%2C+a%2C+...%29+%5Cright%5C%7D+v%28t%29+%5C%5C+++%26%2B+%5Cleft%5C%7B+%5Cleft%5B+%5Cpartial_2+F%28t%2C+q%2C+v%2C+a%2C+...%29+%5Cright%5D+G%28t%2C+q%2C+v%2C+a%2C+...%29+%2B+F%28t%2C+q%2C+v%2C+a%2C+...%29+%5Cpartial_2+G%28t%2C+q%2C+v%2C+a%2C+...%29+%5Cright%5C%7D+a%28t%29+%2B+...+%5C%5C+++++%5Cend%7Baligned%7D++%7D&bg=ffffff&fg=333333&s=0&c=20201002)
![\displaystyle{ \begin{aligned} &= \left[ \partial_0 F(t, q, v, a, ...) \right] G(t, q, v, a, ...) \\ &+ \left[ \partial_1 F(t, q, v, a, ...) \right] G(t, q, v, a, ...) v(t) \\ &+ \left[ \partial_2 F(t, q, v, a, ...) \right] G(t, q, v, a, ...) a(t) + ... \\ \\ &+ F(t, q, v, a, ...) \partial_0 G(t, q, v, a, ...) \\ &+ F(t, q, v, a, ...) \partial_1 G(t, q, v, a, ...) v(t) \\ &+ F(t, q, v, a, ...) \partial_2 G(t, q, v, a, ...) a(t) + ... \\ \end{aligned} }](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle%7B++%5Cbegin%7Baligned%7D++++++%26%3D++++%5Cleft%5B+%5Cpartial_0+F%28t%2C+q%2C+v%2C+a%2C+...%29+%5Cright%5D+G%28t%2C+q%2C+v%2C+a%2C+...%29+%5C%5C++++%26%2B+%5Cleft%5B+%5Cpartial_1+F%28t%2C+q%2C+v%2C+a%2C+...%29+%5Cright%5D+G%28t%2C+q%2C+v%2C+a%2C+...%29+v%28t%29+%5C%5C+++%26%2B+%5Cleft%5B+%5Cpartial_2+F%28t%2C+q%2C+v%2C+a%2C+...%29+%5Cright%5D+G%28t%2C+q%2C+v%2C+a%2C+...%29+a%28t%29+%2B+...+%5C%5C+%5C%5C++++%26%2B+F%28t%2C+q%2C+v%2C+a%2C+...%29+%5Cpartial_0+G%28t%2C+q%2C+v%2C+a%2C+...%29+%5C%5C+++%26%2B+F%28t%2C+q%2C+v%2C+a%2C+...%29+%5Cpartial_1+G%28t%2C+q%2C+v%2C+a%2C+...%29+v%28t%29+%5C%5C+++%26%2B+F%28t%2C+q%2C+v%2C+a%2C+...%29+%5Cpartial_2+G%28t%2C+q%2C+v%2C+a%2C+...%29+a%28t%29+%2B+...+%5C%5C+++++%5Cend%7Baligned%7D++%7D&bg=ffffff&fg=333333&s=0&c=20201002)
![\displaystyle{ \begin{aligned} &= \left[ \partial_0 F(t, q, v, a, ...) + \partial_1 F(t, q, v, a, ...) v(t) + \partial_2 F(t, q, v, a, ...) a(t) + ... \right] G(t, q, v, a, ...) \\ &+ F(t, q, v, a, ...) \left[ \partial_0 G(t, q, v, a, ...) + \partial_1 G(t, q, v, a, ...) v(t) + \partial_2 G(t, q, v, a, ...) a(t) + ... \right] \\ \end{aligned} }](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle%7B++%5Cbegin%7Baligned%7D++++++%26%3D++++%5Cleft%5B+%5Cpartial_0+F%28t%2C+q%2C+v%2C+a%2C+...%29+++%2B+%5Cpartial_1+F%28t%2C+q%2C+v%2C+a%2C+...%29+v%28t%29++++%2B+%5Cpartial_2+F%28t%2C+q%2C+v%2C+a%2C+...%29+a%28t%29+%2B+...+%5Cright%5D+G%28t%2C+q%2C+v%2C+a%2C+...%29+%5C%5C+++++%26%2B+F%28t%2C+q%2C+v%2C+a%2C+...%29+%5Cleft%5B+%5Cpartial_0+G%28t%2C+q%2C+v%2C+a%2C+...%29+%2B+%5Cpartial_1+G%28t%2C+q%2C+v%2C+a%2C+...%29+v%28t%29+%2B+%5Cpartial_2+G%28t%2C+q%2C+v%2C+a%2C+...%29+a%28t%29+%2B+...+%5Cright%5D+%5C%5C+++++%5Cend%7Baligned%7D++%7D&bg=ffffff&fg=333333&s=0&c=20201002)
![\displaystyle{ \begin{aligned} &= \left\{ D_t F \circ \Gamma[q] (t) \right\} G(t, q, v, a, ...) + F(t, q, v, a, ...) D_t G \circ \Gamma[q] (t) \\ \end{aligned} }](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle%7B++%5Cbegin%7Baligned%7D++++++%26%3D+%5Cleft%5C%7B++D_t+F+%5Ccirc+%5CGamma%5Bq%5D+%28t%29+%5Cright%5C%7D+G%28t%2C+q%2C+v%2C+a%2C+...%29+%2B+F%28t%2C+q%2C+v%2C+a%2C+...%29+D_t+G+%5Ccirc+%5CGamma%5Bq%5D+%28t%29+%5C%5C+++++%5Cend%7Baligned%7D++%7D&bg=ffffff&fg=333333&s=0&c=20201002)
![\displaystyle{ \begin{aligned} &= \left\{ D_t F \circ \Gamma[q] (t) \right\} G \circ \Gamma[q] (t) + F \circ \Gamma[q] (t) D_t G \circ \Gamma[q] (t) \\ \end{aligned} }](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle%7B++%5Cbegin%7Baligned%7D++++++%26%3D+%5Cleft%5C%7B++D_t+F+%5Ccirc+%5CGamma%5Bq%5D+%28t%29+%5Cright%5C%7D+G+%5Ccirc+%5CGamma%5Bq%5D+%28t%29+%2B+F+%5Ccirc+%5CGamma%5Bq%5D+%28t%29+D_t+G+%5Ccirc+%5CGamma%5Bq%5D+%28t%29+%5C%5C+++++%5Cend%7Baligned%7D++%7D&bg=ffffff&fg=333333&s=0&c=20201002)
![\displaystyle{\delta_\eta (fg)[q]}](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle%7B%5Cdelta_%5Ceta+%28fg%29%5Bq%5D%7D&bg=ffffff&fg=333333&s=0&c=20201002) is
is![\displaystyle{\delta_\eta (f[q]g[q])}](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle%7B%5Cdelta_%5Ceta+%28f%5Bq%5Dg%5Bq%5D%29%7D&bg=ffffff&fg=333333&s=0&c=20201002)
![\displaystyle{ \begin{aligned} &= \left[ (D_t F) G + F D_t G \right] \circ \Gamma[q] (t) \\ \end{aligned} }](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle%7B++%5Cbegin%7Baligned%7D++++++%26%3D+%5Cleft%5B++%28D_t+F%29+G+%2B+F+D_t+G+%5Cright%5D+%5Ccirc+%5CGamma%5Bq%5D+%28t%29+%5C%5C+++++%5Cend%7Baligned%7D++%7D&bg=ffffff&fg=333333&s=0&c=20201002)
![\displaystyle{ \begin{aligned} D_t (FG) \circ \Gamma[q] (t) &= \left[ (D_t F) G + F D_t G \right] \circ \Gamma[q] (t) \\ \\ D_t (FG) &= (D_t F) G + F D_t G \\ \end{aligned} }](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle%7B++%5Cbegin%7Baligned%7D++++++D_t+%28FG%29+%5Ccirc+%5CGamma%5Bq%5D+%28t%29+%26%3D+%5Cleft%5B++%28D_t+F%29+G+%2B+F+D_t+G+%5Cright%5D+%5Ccirc+%5CGamma%5Bq%5D+%28t%29+%5C%5C+%5C%5C++++D_t+%28FG%29+%26%3D+%28D_t+F%29+G+%2B+F+D_t+G+%5C%5C+++++%5Cend%7Baligned%7D++%7D&bg=ffffff&fg=333333&s=0&c=20201002)




You must be logged in to post a comment.